


Home >
Sensor Fusion >
ACHIRES: Improved Running Taking Dynamically Unstable Forward-Bent Posture Achieved with High-Speed Vision
ACHIRES: Improved Running Taking Dynamically Unstable Forward-Bent Posture Achieved with High-Speed Vision
| With the goal of pursuing the limit of the machine system beyond the human being by improving both hardware and control method, we developed an entirely new bipedal running robot system "ACHIRES" (Actively Coordinated High-speed Image-processing Running Experiment System) using the high-speed visual feedback, and we have realized a high speed running as the first step of this research. The overview of ACHIRES system. |
Summary
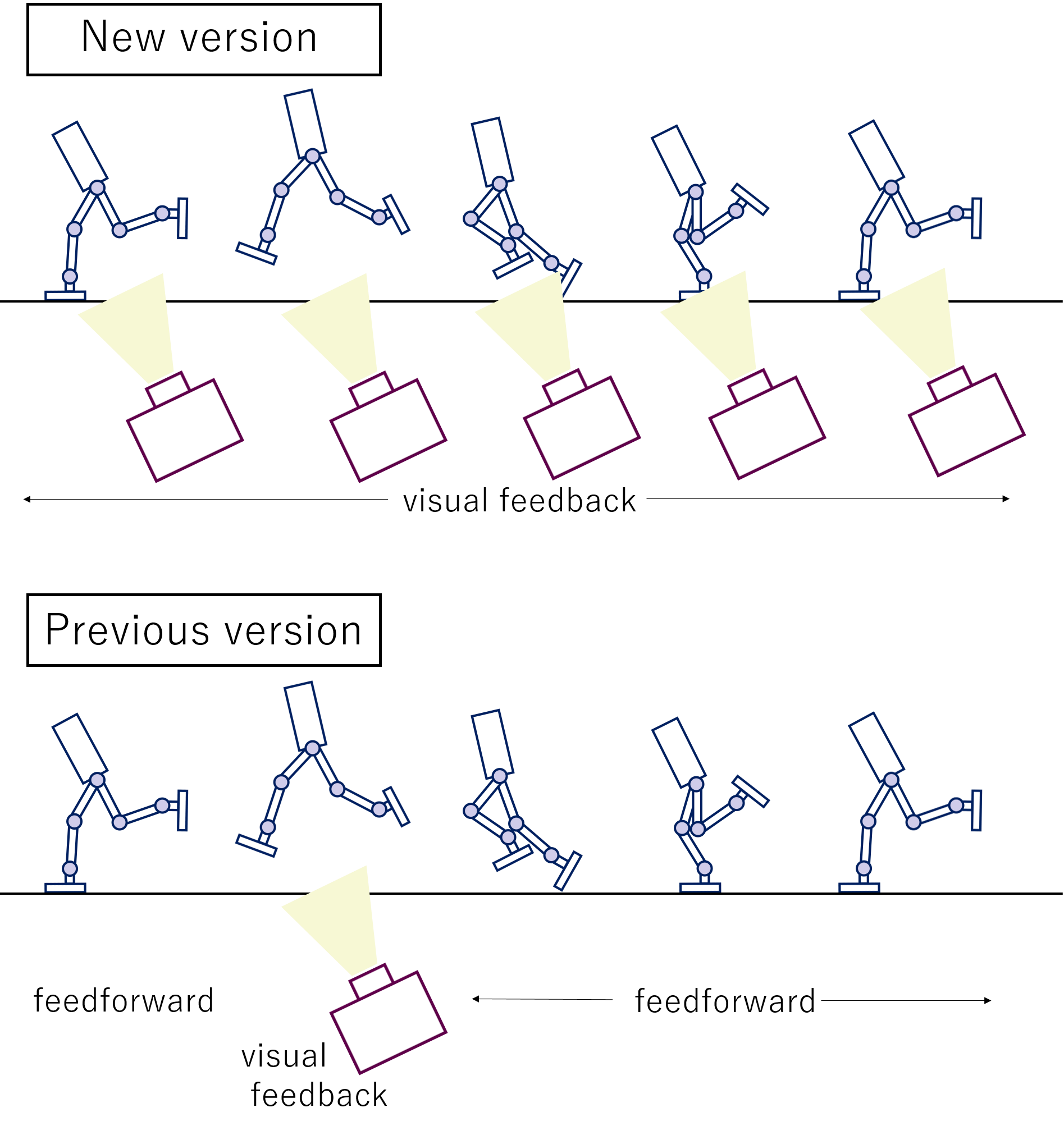
In this research, the control method for bipedal running system ACHIRES was improved to accomplish more reliable running. ACHIRES is a high-speed bipedal running system that consists of high-power bipedal robot and high-speed vision. In the previous method, the posture information acquired from the high-speed vision was used only when both legs were off the ground, and the control was feed-forward otherwise. Adapting the new method with the visual feedback introduced to almost all process of running, now ACHIRES can run more reliably for a longer time in a more forward-bent posture like human.
Notice
-
This robot along with the Active Assistant robot was on exhibition in iREX (Nov.29 - Dec.2, 2017) . Thank you for coming.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
If you want to use the original video, please send an e-mail for copyright permission to contact .