Development of High-speed 3D Position Compensation System with High-speed Visual Feedback
Summary
With the increasingly diverse needs of users, the production line is
shifting from the conventional low-mix high-volume production to
high-mix low-volume production, and the flexibility and intelligence
of machines and industrial robots are required. In response to this,
we have proposed an intelligent system based on
Dynamic compensation, in which a compensation module that controls a high-speed
actuator based on high-speed sensor information is installed ahead
of existing robots and human-operated machines, and developed a
system that uses dynamic compensation to perform a variety of
tasks.
However, in previous studies, the compensation motion was limited to
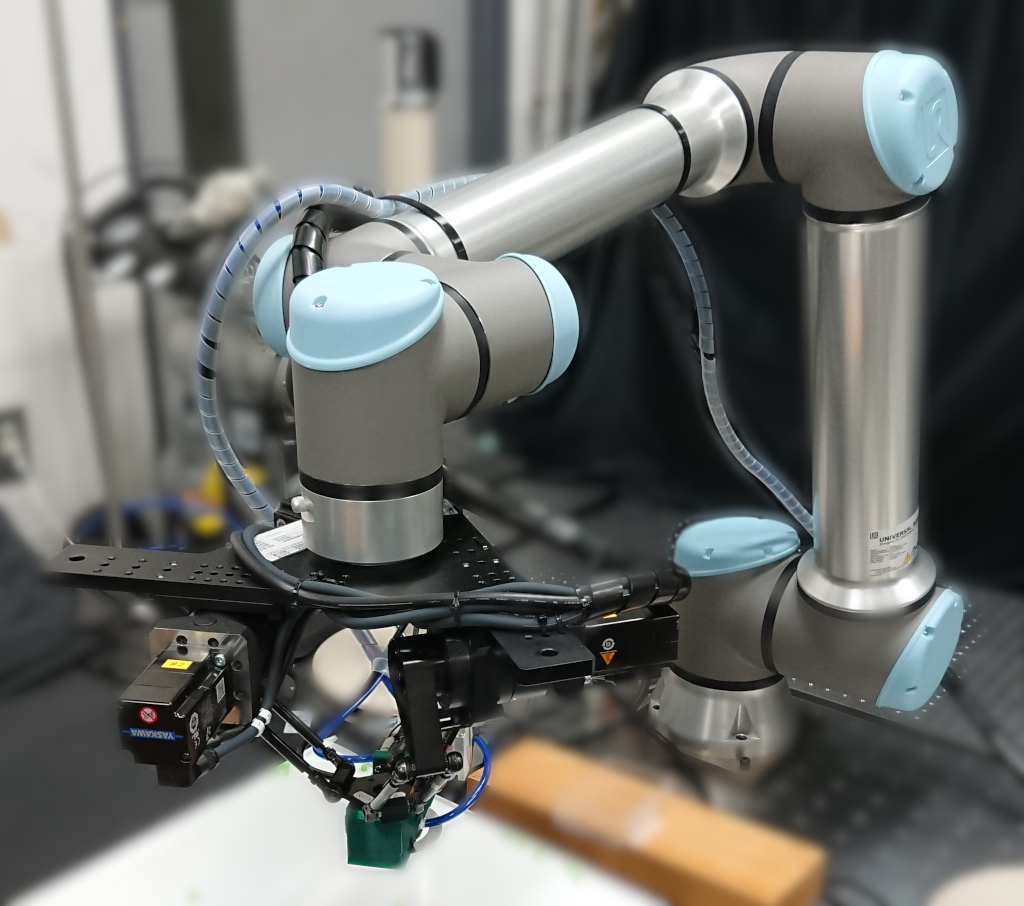
two-dimensional motion. Therefore, in this study, we developed a
high-speed 3-axis position compensation module with high-speed
visual feedback for high-speed and high-accuracy 3-D motion.
Specifically, we constructed a compact and lightweight three-axis
(x-, y-, z-axis) delta robot that can be mounted on the end point of
a robot arm. We measured the horizontal accuracy in the x- and
y-axis directions using a laser displacement meter, and confirmed
that the motion accuracy was less than 7% at 20 Hz or less in a
circular orbit with a radius of 3 mm, and that the repeatability was
less than 1.3% of the distance traveled even when there was 50%
horizontal movement in the z-axis direction.