


ステレオビジョンを用いた高精度車間距離計測
概要
カメラは優れた環境認識性能を有するため,自動運転や先進運転支援システムを実現する上で欠かせないセンサの一つです. 本研究では自動運転の中でも,隊列走行などの車間距離維持や衝突被害軽減ブレーキにおいて重要な車間距離計測に注目します. 通常,車間距離はLiDARやミリ波レーダといったセンサを用いて計測されますが, カメラを用いて高精度な車間距離推定が実現されると,これらのセンサを補完する役割が期待できるため, 自動運転において極めて重要な,より確実性の高いシステムを構築することができます. しかし,カメラによるこれまでの測距方法では,これらのセンサを補完する役割を期待できるほどの精度を出すことは困難でした.
そこで本研究では,この限界を打破するため,ステレオ高速ビジョンを用いた高精度車間距離計測手法を提案します(図1). 提案手法では,まず前方車を正確にトラッキングするため,ステレオ高速ビジョン用に特化したトラッキングアルゴリズムを利用します(図2). さらに,ステレオカメラによる三角測量の精度限界を超えた極めて正確かつロバストな車間距離を推定するため,三角測量とスケールを組み合わせた測距手法によって得られる複数の距離候補をうまく統合する Multiple Scale Aggregation と呼ぶ処理を提案しました(図3). この際,計算量の増大を抑えるため,キーフレームにおいて事前にできるだけ計算を完了させる Patch Multiplexing と呼ぶ処理を提案し,高速化を図りました. 実際の道路において提案手法による測距精度をレーザレンジファインダと比較したところ,ほぼ同等の精度を達成したことを確認しました. また,カルマンフィルタの導入により,相対速度及び相対加速度を高い精度で推定することに成功しました. 推定の様子はYouTubeを御覧ください.
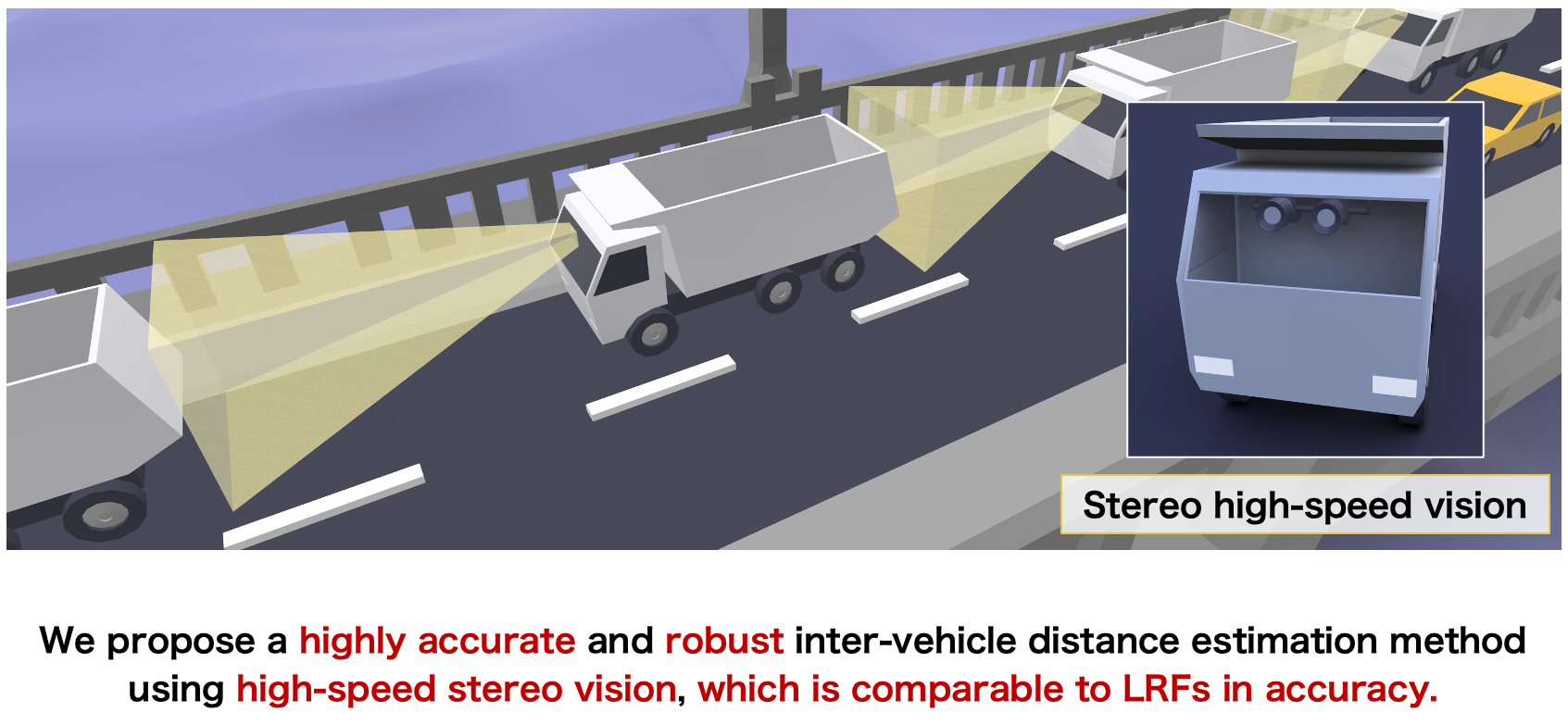
図1 本研究のコンセプト
図2 前方車のトラッキング
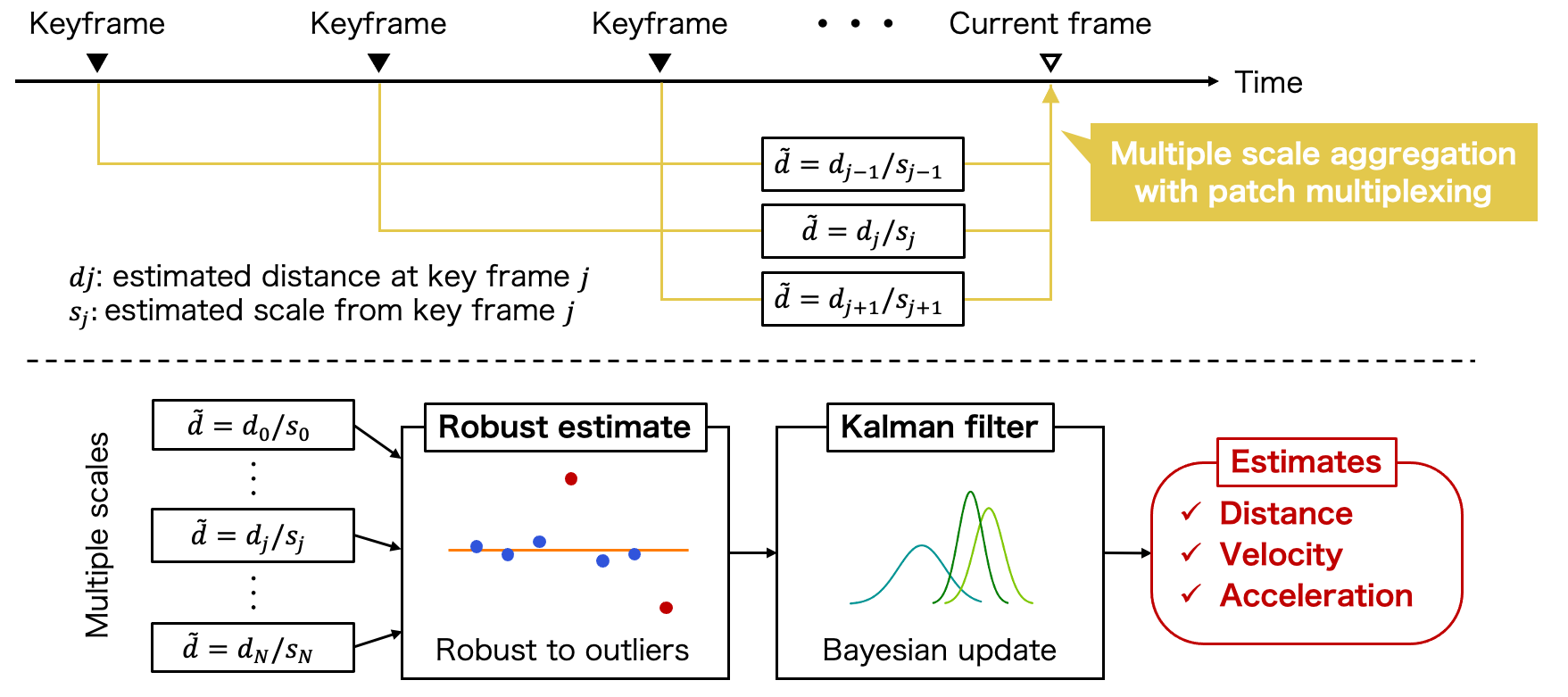
図3 Multiple scale aggregationを用いた車間距離計測の概要
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Masahiro Hirano, Yuji Yamakawa, Taku Senoo, Norimasa Kishi, Masatoshi Ishikawa: Multiple Scale Aggregation with Patch Multiplexing for High-speed Inter-vehicle Distance Estimation, IEEE Intelligent Vehicles Symposium (IV2021) (Virtual, 2021.7.12)/Proceedings, pp.1436-1443 (2021).