


Inter-vehicle distance estimation using stereo high-speed vision
Summary
A camera is one of the indispensable sensors for autonomous driving and advanced driver assistance systems because of its excellent environment recognition performance. In this research, we focus on distance measurement, which is important for autonomous driving, such as maintaining distance for driving in formation and autonomous emergency braking. Usually, distance is measured using sensors such as LiDAR and millimeter wave radar. However, if a camera can be used to accurately estimate the distance, it can be expected to complement these sensors. This is extremely important in autonomous driving because it realizes a more reliable system. However, it has been difficult to achieve such accuracy using conventional camera-based distance measurement methods that can be expected to complement these sensors.
We propose an accurate and robust inter-vehicle distance estimation method using a stereo high-speed vision (Fig.1). The framework involves two phases: a tracking phase, in which a preceding vehicle is accurately and stably tracked by a novel visual tracking algorithm optimized for stereo high-speed vision (Fig.2); and a distance estimation phase, in which multiple distance estimations by scaling are aggregated to provide an accurate and robust estimation with a specially designed technique, patch multiplexing, to perform the aggregation efficiently and effectively (Fig.3). By using a high-speed laser rangefinder to compare not only distance, but also velocity and acceleration using a Kalman filter, we showed that the accuracy of inter-vehicle distance estimation can be favorably compared with the laser rangefinder. See our YouTube for demonstration.
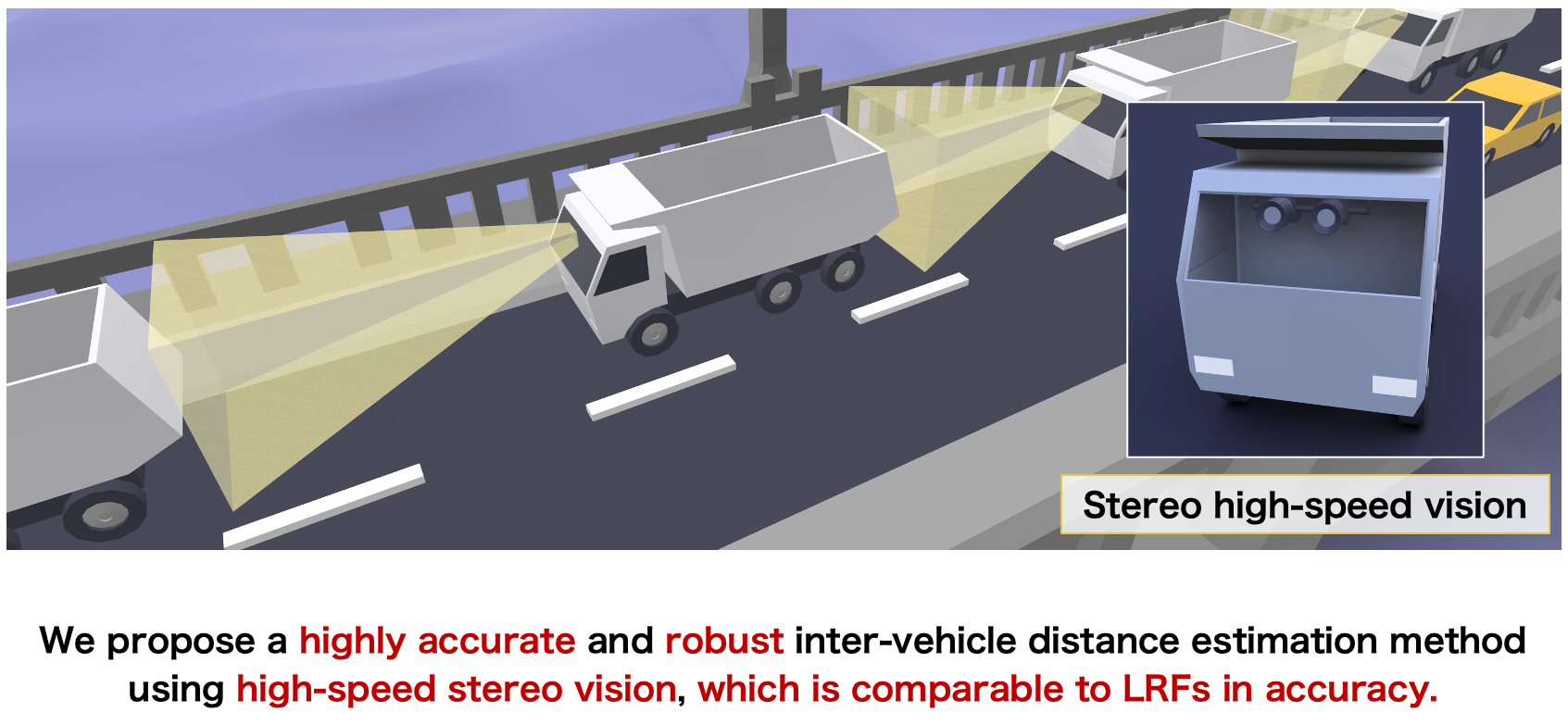
Fig.1 Concept.
Fig.2 Tracking of a vehicle in front.
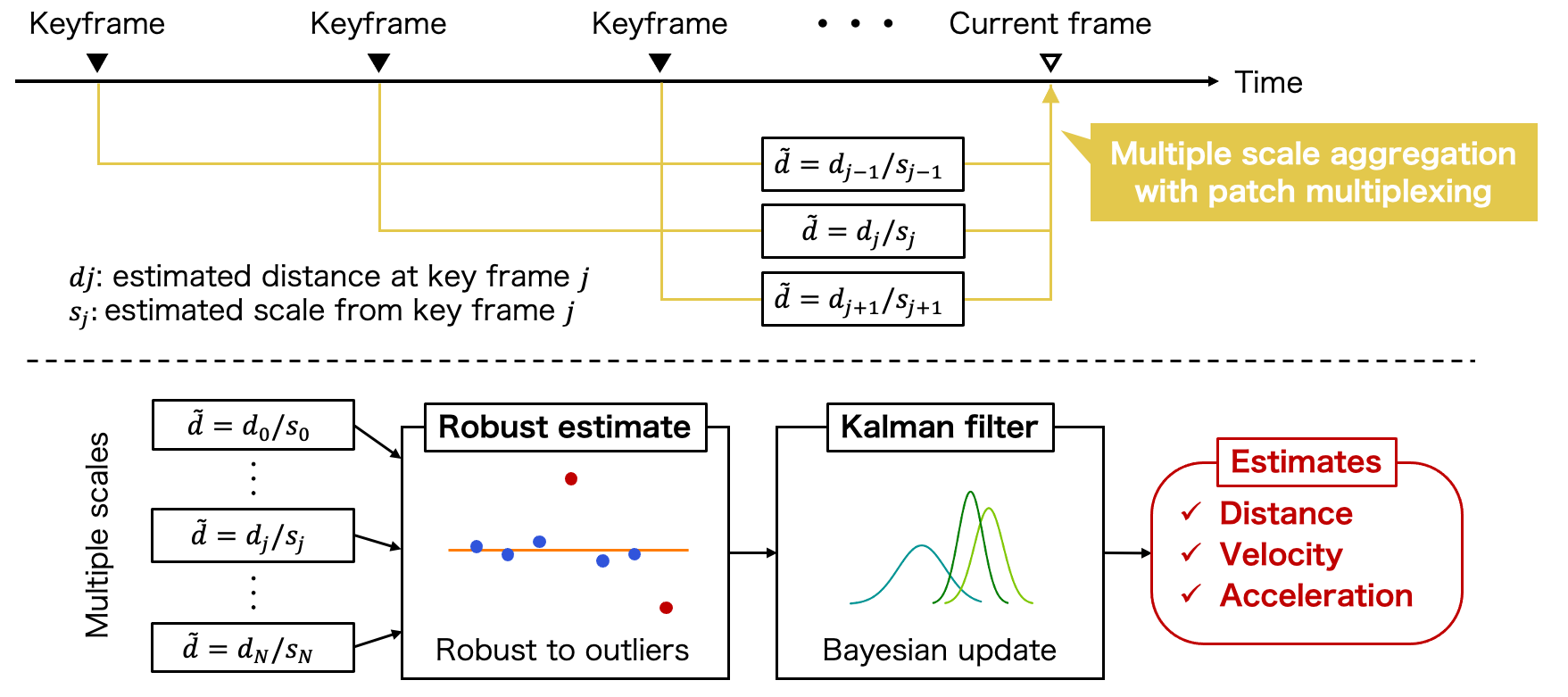
Fig.3 Distance estimation with multiple scale aggregation.
YouTube
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Masahiro Hirano, Yuji Yamakawa, Taku Senoo, Norimasa Kishi, Masatoshi Ishikawa: Multiple Scale Aggregation with Patch Multiplexing for High-speed Inter-vehicle Distance Estimation, IEEE Intelligent Vehicles Symposium (IV2021) (Virtual, 2021.7.12) / Proceedings, pp.1436-1443 (2021).