


ビジョンチップを用いたウェアラブルマンマシンインターフェース
概要
デジタルカメラやカメラ付き携帯電話の普及により,イメージセンサが身近なものになってきている. それに伴い,バーコードの認識など,カメラを撮影以外の目的で使用する機会も増えつつある. マシンビジョンの分野では,昔からカメラを用いた自動認識が盛んに行われているが, 動画像をリアルタイムに扱うには,かなりのマシンパワーを必要としていた.
一方、ビジョンチップを利用することで、高フレームレートの動画像をリアルタイムに扱いながらも, 小型軽量なシステムが構築可能である.この利点を生かして, 人間が身に付けられるほどの小型軽量なマンマシンインターフェースシステムをいくつか作成した.
一つは,人間の目の動きをトラッキングすることで, 視線方向やまばたきなどを入力とするインターフェースシステムである。 二値化により瞳の領域を検出し,その重心を取得する.ビジョンチップの高速性を生かして, サッケードやまばたきなどの通常のカメラでは取得できない高速な動きにも対応している. 現在のビジョンチップの画素数でも,インターフェースとして用いるには十分な位置精度が得られた. さらに,注視点を画面上に表示するデモプログラムを作成した.
もう一つは,カメラ自身をインターフェースに見立て,その位置姿勢を入力とするものである. カメラに映る画像の特徴点の動きから,カメラの三次元位置姿勢が求められることはよく知られている. そこで今回は撮像対象としてマーカーを与え,その重心の動きから三次元位置姿勢を計算した.
使用したビジョンチップは解像度が 48×32 と極めて低いため, そのままでは量子化誤差が大きく乗ってしまう.そこで, 等速度・等角速度運動を仮定した状態モデルと透視投影に基づく観測モデルを導入し, 拡張カルマンフィルタを用いて状態を推定することで, 時間方向に密な情報を用いて量子化誤差の影響を抑え,高精度な計測ができるようにした. Fig. 1 に実験の様子と結果を示す.図から, カメラの位置と姿勢(向き)が安定して取得できていることがわかる.
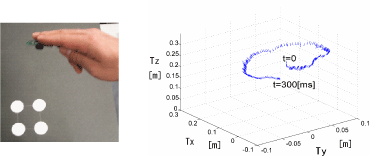
Fig.1 6次元入力コントローラ
動画
参考文献
- Takashi Komuro, Björn Werkmann, Takashi Komai, Masatoshi Ishikawa, Shingo Kagami : A High-Speed and Compact Vision System Suitable for Wearable Man-machine Interfaces, Proc. IAPR 10th Conference on Machine Vision Applications(MVA2007)/pp.199-202 (2007) [PDF]
- 小室孝,ビヨーン ウェアクマン,駒井崇志,鏡慎吾,石川正俊: ビジョンチップシステムの小型化とウェアラブルマンマシンインターフェースへの応用, 第5回情報科学技術フォーラム一般講演論文集第3分冊/pp.463-464(K-037) (2006)
- Björn Werkmann, Takashi Komuro, Akio Namiki, Masatoshi Ishikawa : Development of a High Speed Eye Tracking System Using the Vision Chip, 日本機械学会ロボティクス・メカトロニクス講演会'05/講演論文集, 2P1-N-094 (2005)
- 駒井崇志,鏡慎吾,小室孝,石川正俊: ウェアラブルインタフェースのためのビジョンチップの位置姿勢推定法の検討, 第5回計測自動制御学会システムインテグレーション部門講演会/論文集,pp.202-203 (2004)
- 小室孝, 石川正俊, 石井抱, 吉田淳, 稲田喜昭, 小宮泰宏: 高速対象追跡ビジョンチップの開発, 計測と制御, Vol.43, pp.802-804 (2004)