


ホーム >
システム ビジョン デザイン > RIFNOM/BIFNOM 法線画像における特徴点検出と特徴量記述
RIFNOM/BIFNOM 法線画像における特徴点検出と特徴量記述
概要
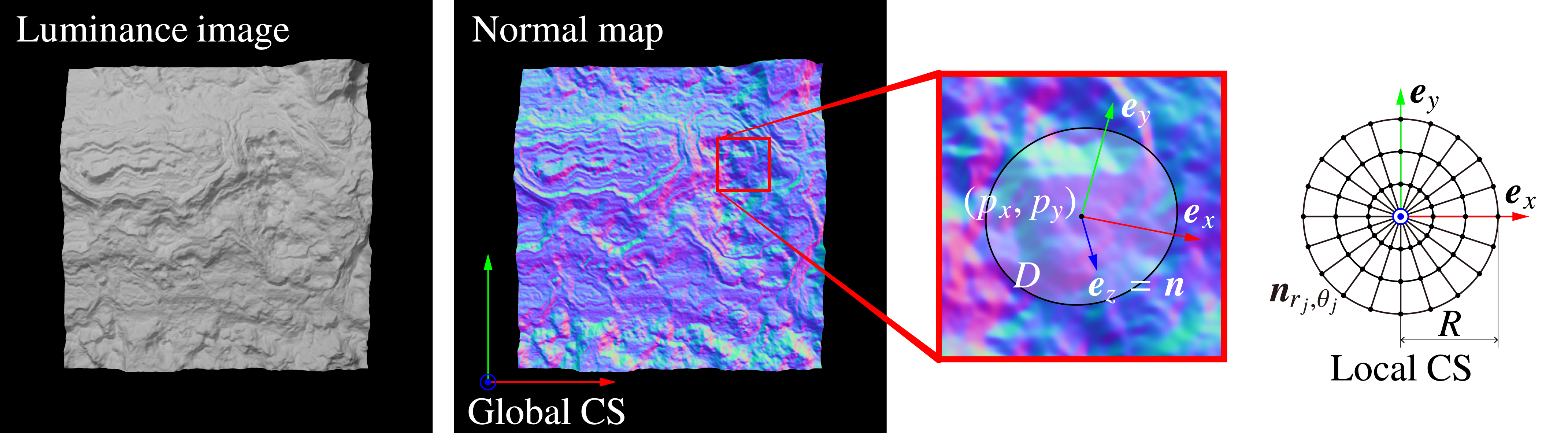
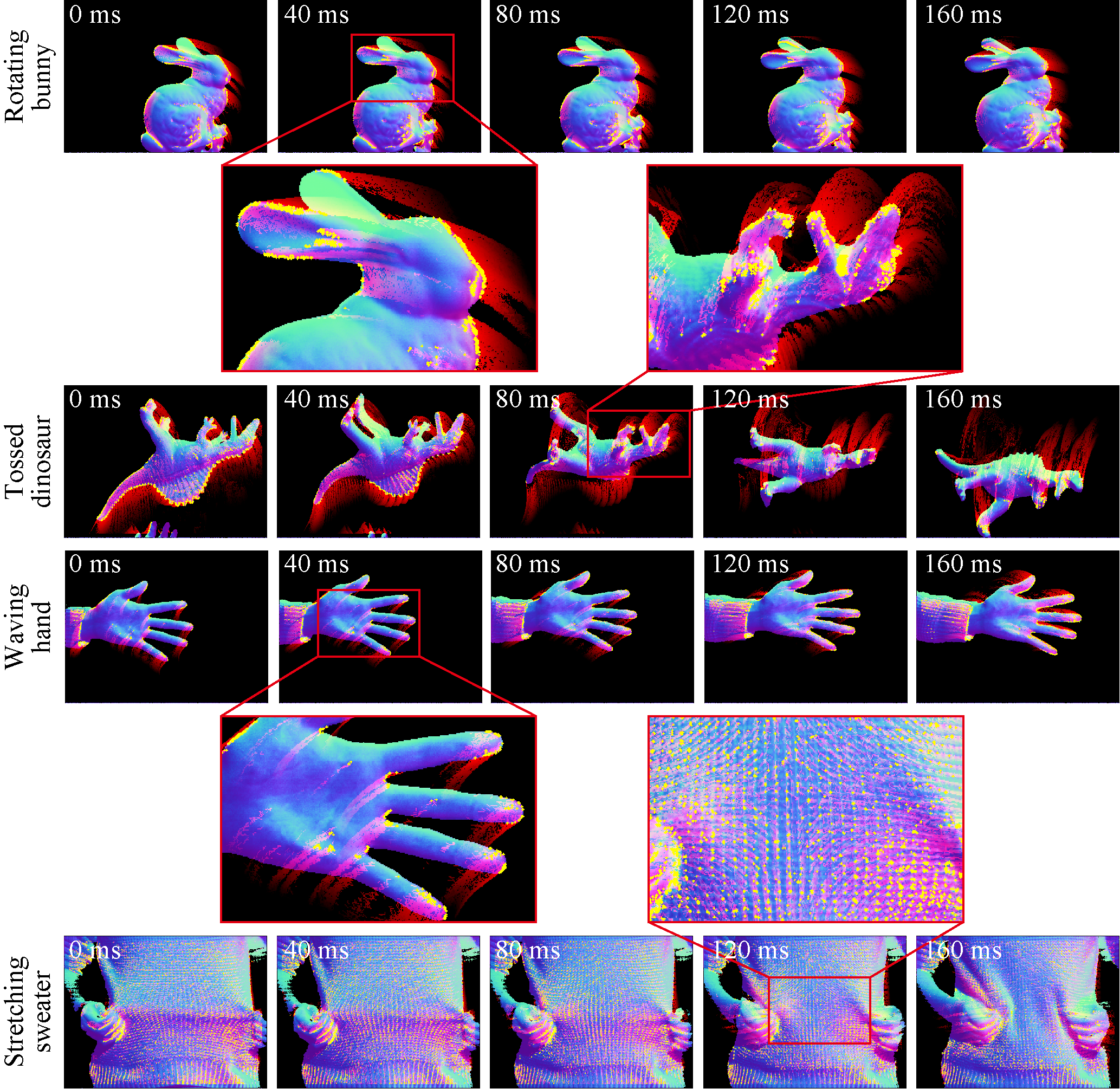
この研究では、法線画像上の特徴点を検出し、特徴量を記述するための新しい手法としてRIFNOMを提案し、また高速化のためのバイナリ特徴量としてBIFNOMを提案しています. これらの特徴量は3次元回転に対して不変であり、色のテクスチャに乏しい対象や非剛体に対しても適用でき、高速に特徴点検出とマッチングが行える特徴を持っています. 従来の法線画像を対象とした特徴検出手法および特徴量記述は、輝度画像を対象としたものとは異なり、色のテクスチャに乏しい対象にも適用できる点で優れていましたが、 3次元回転に対応できない、検出やマッチングにかかる計算コストが大きいといった問題がありました. そこで、本研究では図1のように3次元局所座標系を導入し、周辺の法線ベクトルを特徴量化、さらにバイナリコード化することで、これらの問題を解決しました. シミュレーションおよび図2のような実環境の両方で提案手法の性能を評価し、バイナリ化したBIFNOMでは750fps以上のリアルタイム特徴点検出・マッチングが可能であることを示しました.
 |
 |
参考文献
- Leo Miyashita, Akihiro Nakamura, Takuto Odagawa, Masatoshi Ishikawa: BIFNOM: Binary-Coded Features on Normal Maps, Sensors, Vol.21, No.10, Article No.3469 (2021)
- Akihiro Nakamura, Leo Miyashita, Yoshihiro Watanabe and Masatoshi Ishikawa: RIFNOM: 3D Rotaion-Invariant Features on Normal Maps, Eurographics 2018, Posters, Delft, Netherlands, 16-20 Apr. (2018)