DPM-1000: Dynamic projection mapping system using high-speed color projector and high-speed vision chip
Summary
We propose a novel method for detecting features on normal maps and describing features, called RIFNOM and the binarized features, called BIFNOM,
that are three-dimensionally rotation invariant and detects and matches interest points at high speed
regardless of whether a target is textured or textureless and rigid or non-rigid.
Conventional methods of detecting features on normal maps also can be applied to textureless targets, in contrast with features on luminance images;
however, they cannot deal with three-dimensional rotation between each pair of corresponding interest points due to the definition of orientation,
or they have difficulty in achieving fast detection and matching due to a heavy-weight descriptor.
We addressed these issues by introducing a three dimensional local coordinate system as shown in Fig. 1 and converting a normal vector to a float/binary code,
and achieved more than 750fps real-time feature detection and matching.
Furthermore, we present an extended descriptor and criteria for real-time tracking, and evaluate the performance with both simulation and actual system as shown in Fig. 2.
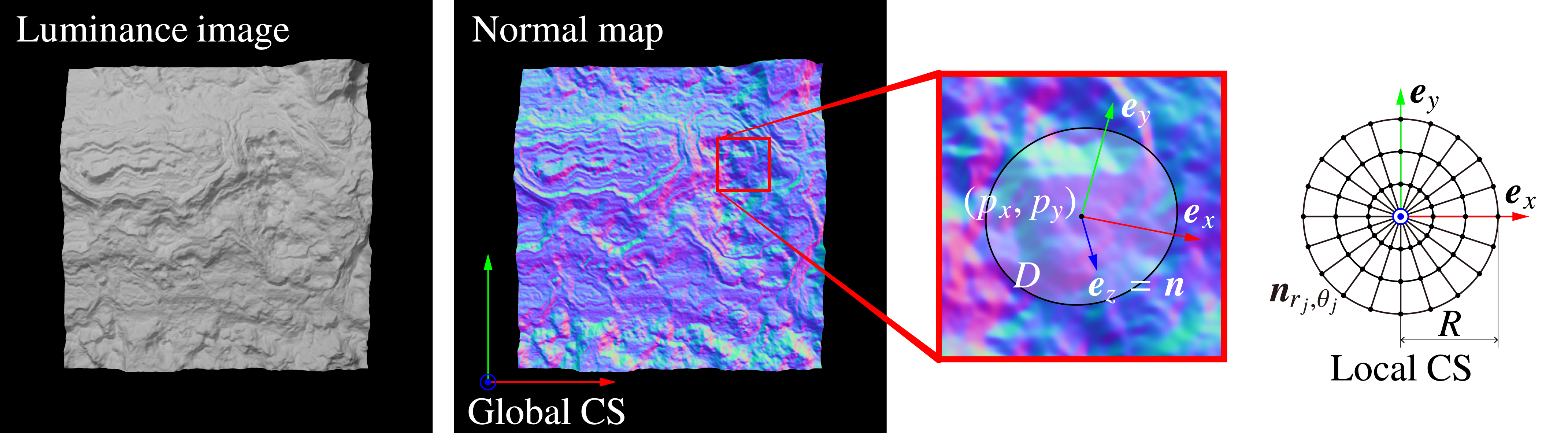 |
| Fig. 1 Introduction of a three dimensional local coordinate system |
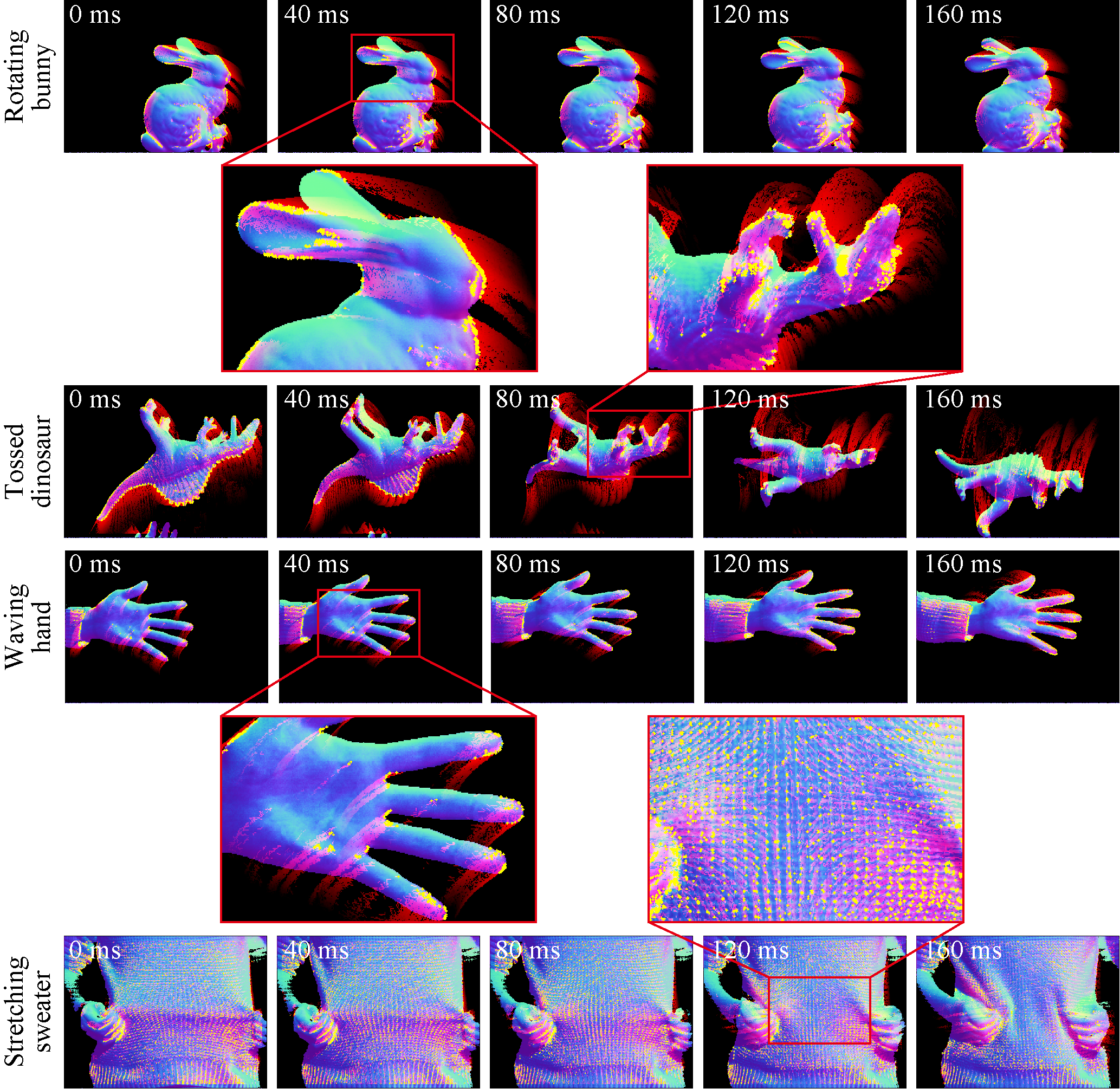 |
| Fig. 2 Tracking of feature points on actual normal maps |
References
- Leo Miyashita, Akihiro Nakamura, Takuto Odagawa, Masatoshi Ishikawa: BIFNOM: Binary-Coded Features on Normal Maps, Sensors, Vol.21, No.10, Article No.3469 (2021)
- Akihiro Nakamura, Leo Miyashita, Yoshihiro Watanabe and Masatoshi Ishikawa: RIFNOM: 3D Rotaion-Invariant Features on Normal Maps, Eurographics 2018, Posters, Delft, Netherlands, 16-20 Apr. (2018)


