


Saccade Argos: 階層化ロバストトラッキングシステム
概要
動く対象にカメラの視線を向けつづけ、継続的に撮影するトラッキング技術はコンピュータビジョンにおける重要なタスクの一つです。 しかし、カメラの画角を望遠にすると対象が詳細に観察できる一方で対象の動きも拡大されるため見失いやすく、 カメラの画角を広角にすると対象を見失いにくい一方で対象が小さく映ってしまうという画角に関するジレンマがあります。 本研究では、広角から望遠まで、異なる画角を持った複数のトラッキングシステムを階層的に扱い、協調的に動作させる制御手法を開発しました。
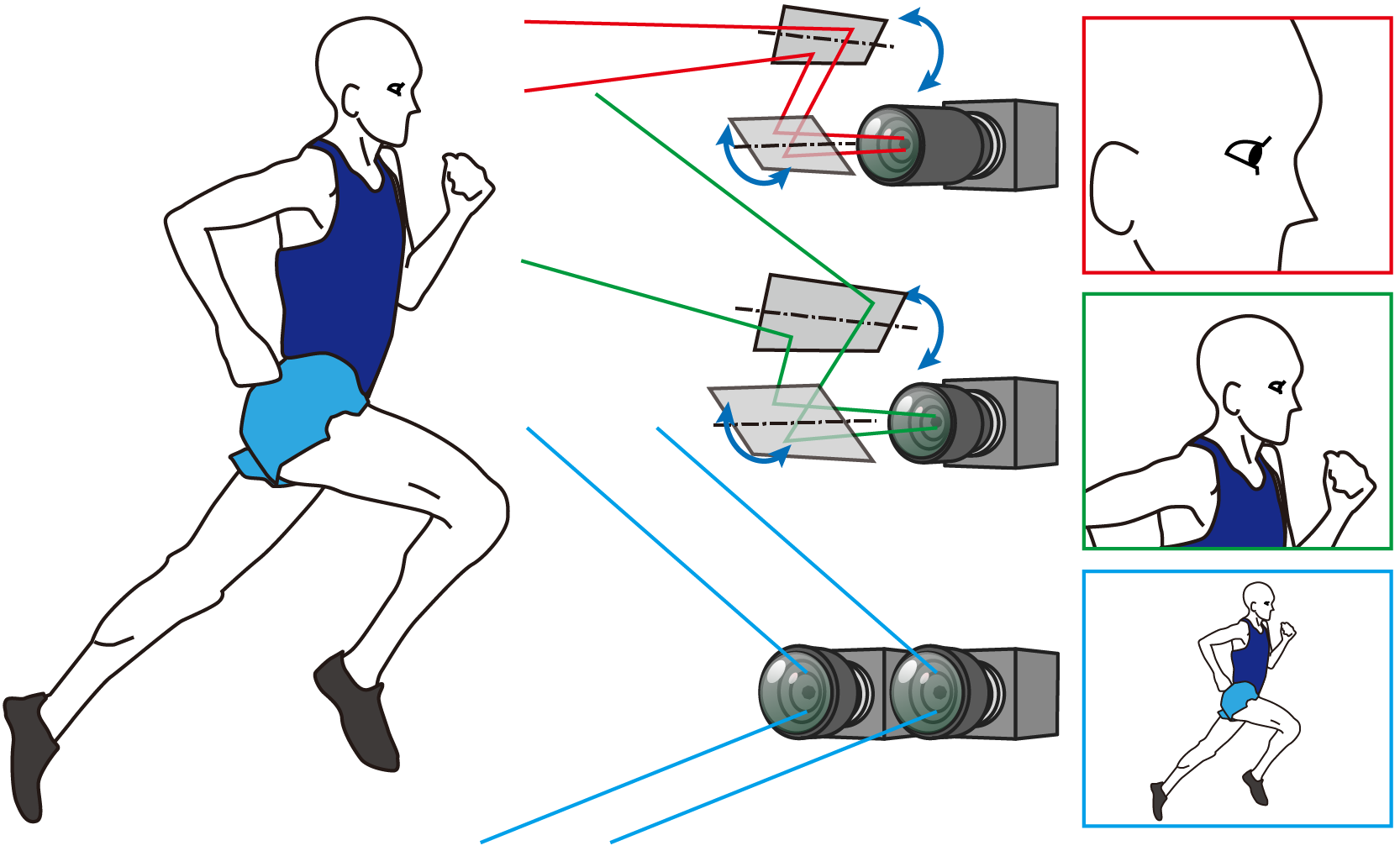
例えば、図1のように広角側では人物全体を検出してトラッキングしつつ、望遠側では顔、さらに望遠の画角では目をトラッキングするといったように トラッキング対象が同一でない場合でも、階層関係や包含関係がある場合には、各々のトラッキング対象を追いながら、相互に情報を伝え合い、 連携してトラッキングを行うことができます。これにより、高速かつ高解像かつ遮蔽に頑健なトラッキングシステムが実現できます。
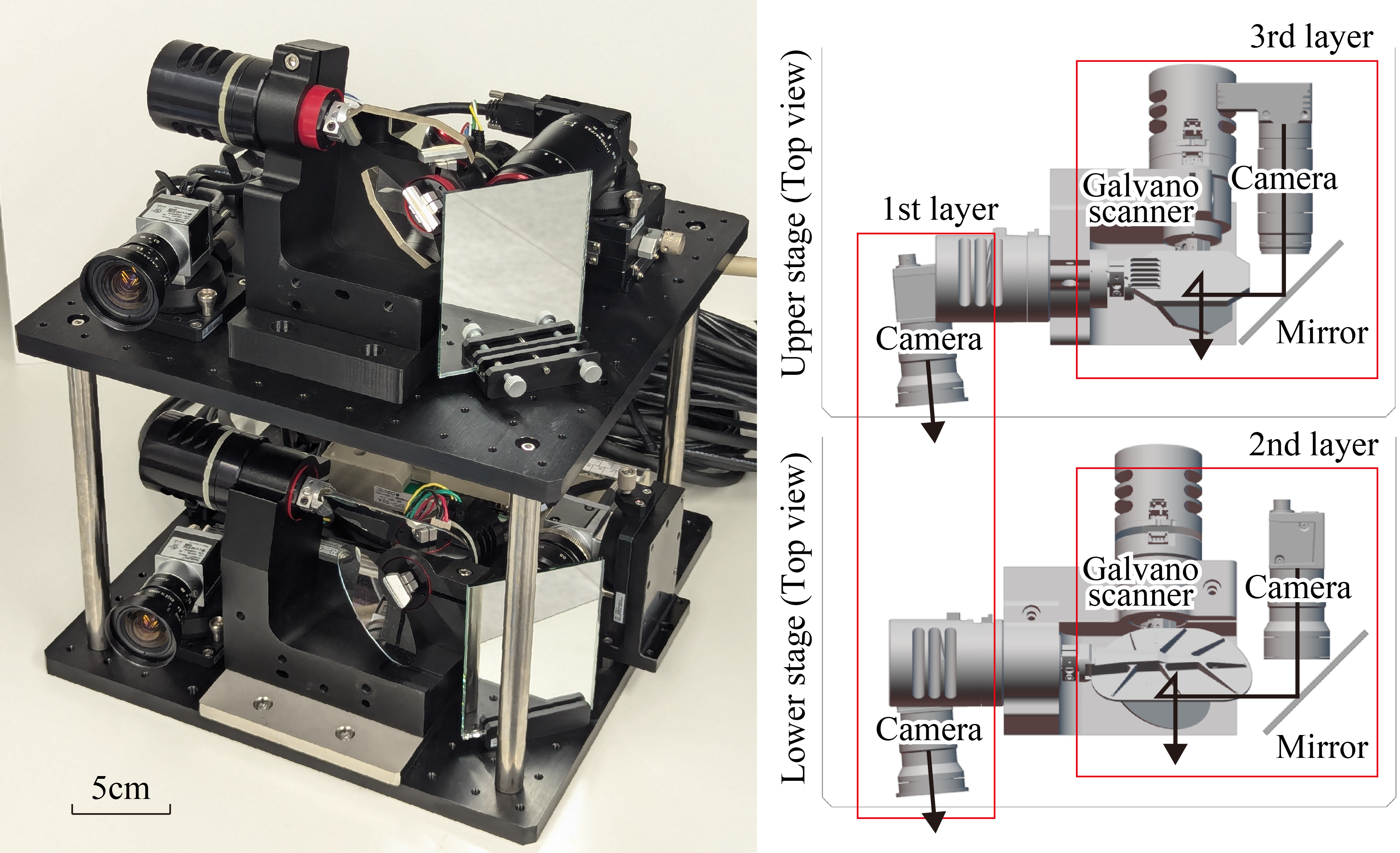
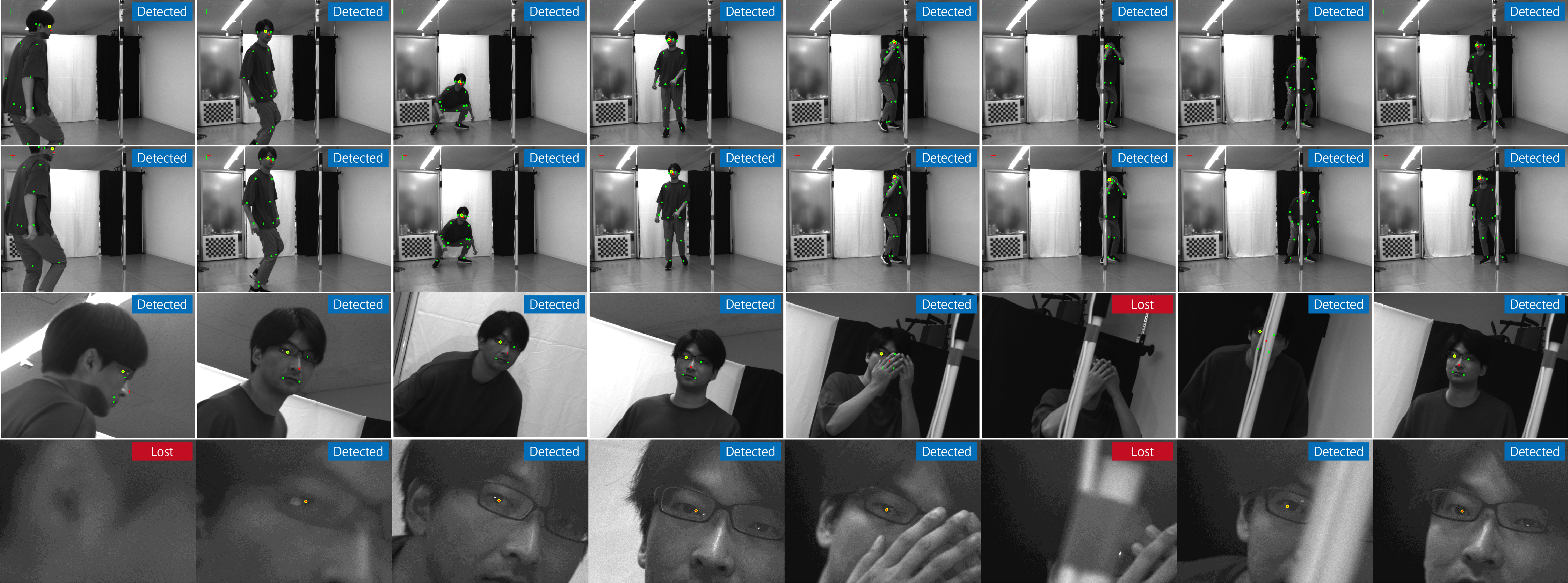
この制御手法を35mm換算の焦点距離が約40mm-800mmの3つのトラッキングシステムを統合した図2のSaccade Argosに適用し、実際に対象のトラッキングを行いました。 図3では、広角側のステレオカメラが約40fpsで人物全体を3次元的に捉え、 中望遠のサッカードミラーが約70fpsでその人物の顔を追いかけ、 望遠のサッカードミラーが1,000fps, 248.3 px/deg.という高速高解像度でその人物の目を追いかけています。 遮蔽によって目や顔を見失った場合でも、広角側が人物全体を認識しているため、望遠側はその対象が存在すると思われる領域を追い続け、 再度検出された際にトラッキングをシームレスに再開することができています。
 |
 |
 |
参考文献
- Leo Miyashita and Masatoshi Ishikawa: Saccade Argos: Hierarchical Robust Tracking System for High Spatio-temporal Resolution Vision, International Symposium on System Integration (SII2025), pp.811-816, Munich, Germany, 21-24 Jan. (2025)