


Saccade Argos: Hierarchical Robust Tracking System for High Spatio-temporal Resolution Vision
Summary
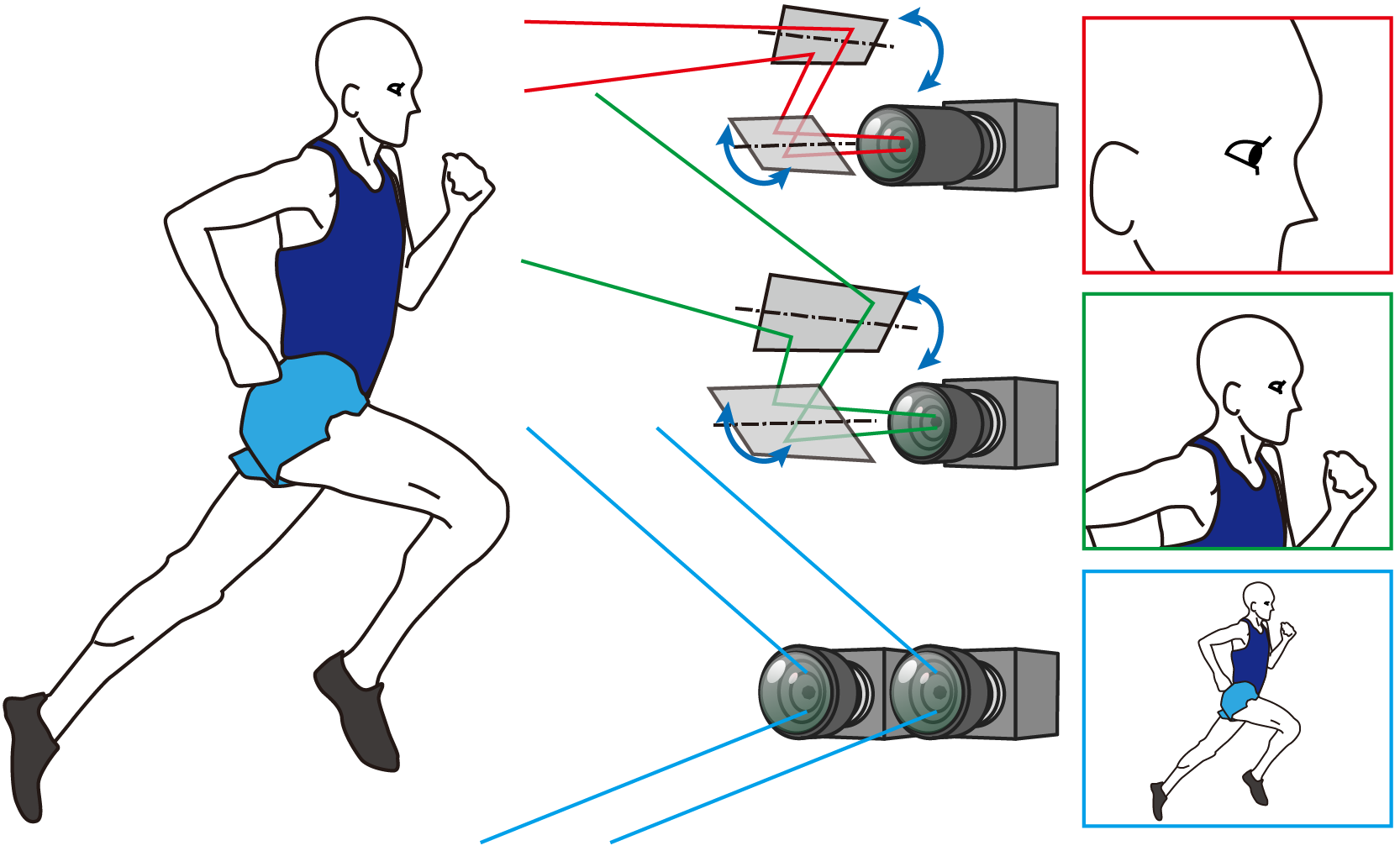
Target tracking is one of the most important tasks in computer vision to keep capturing an object with high spatio-temporal resolution. However, when the field of view is narrowed to capture a target in detail, it is easy to lose sight of the target due to the fast movement or occlusion. In this paper, we propose a system integration method that hierarchically handles multiple visions with different FOV from wide-angle to telephoto, and each vision independently tracks the target while sharing the target position to achieve robust tracking as shown in Fig. 1.
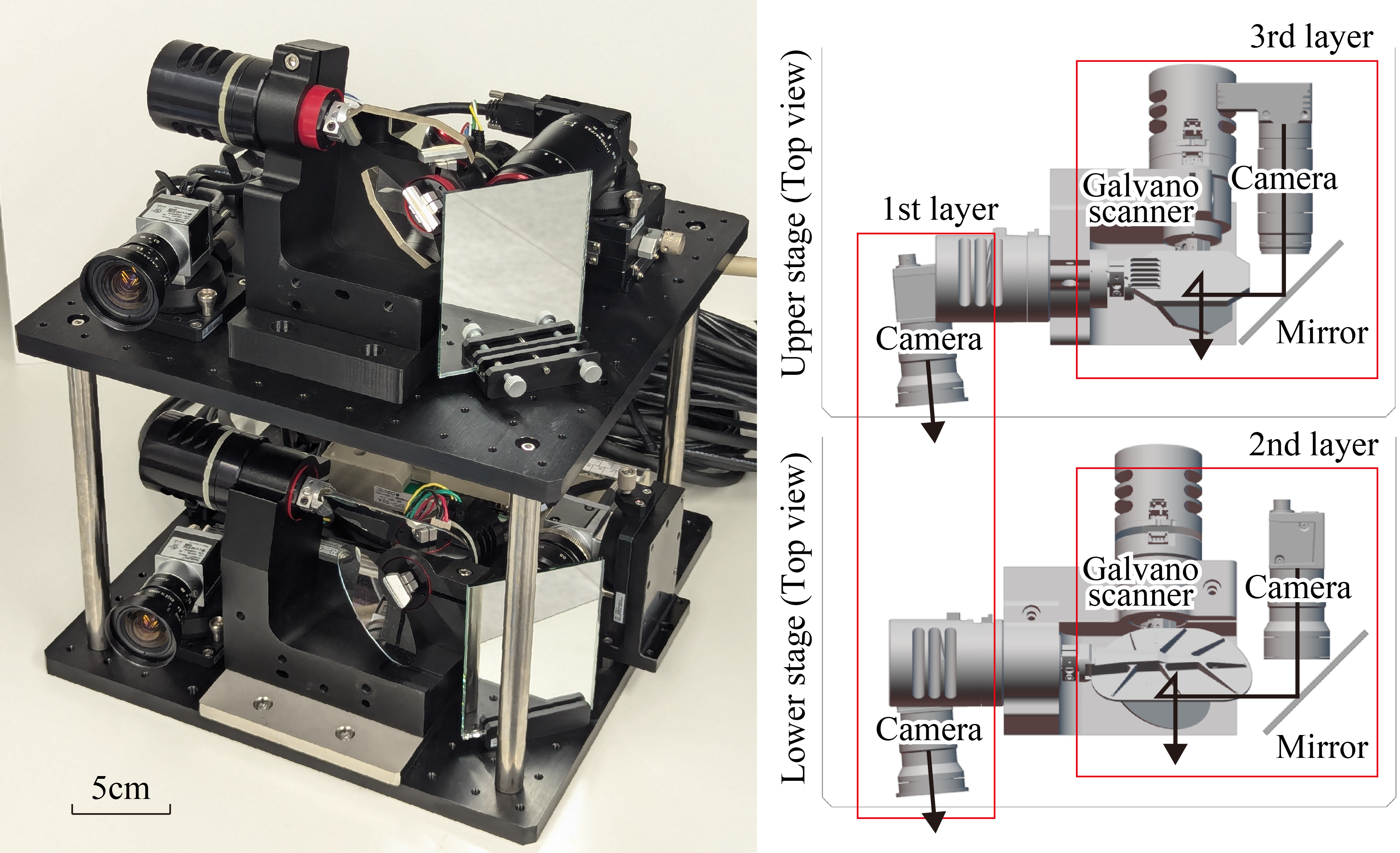
The proposed method was applied to Saccade Argos, a three-tier tracking system that combines a fixed stereo camera and active tracking systems using Galvano scanners as shown in Fig. 2, and achieved robust target tracking against occlusion with high temporal resolution (1,000 fps) and high spatial resolution (248.3 px/deg.).
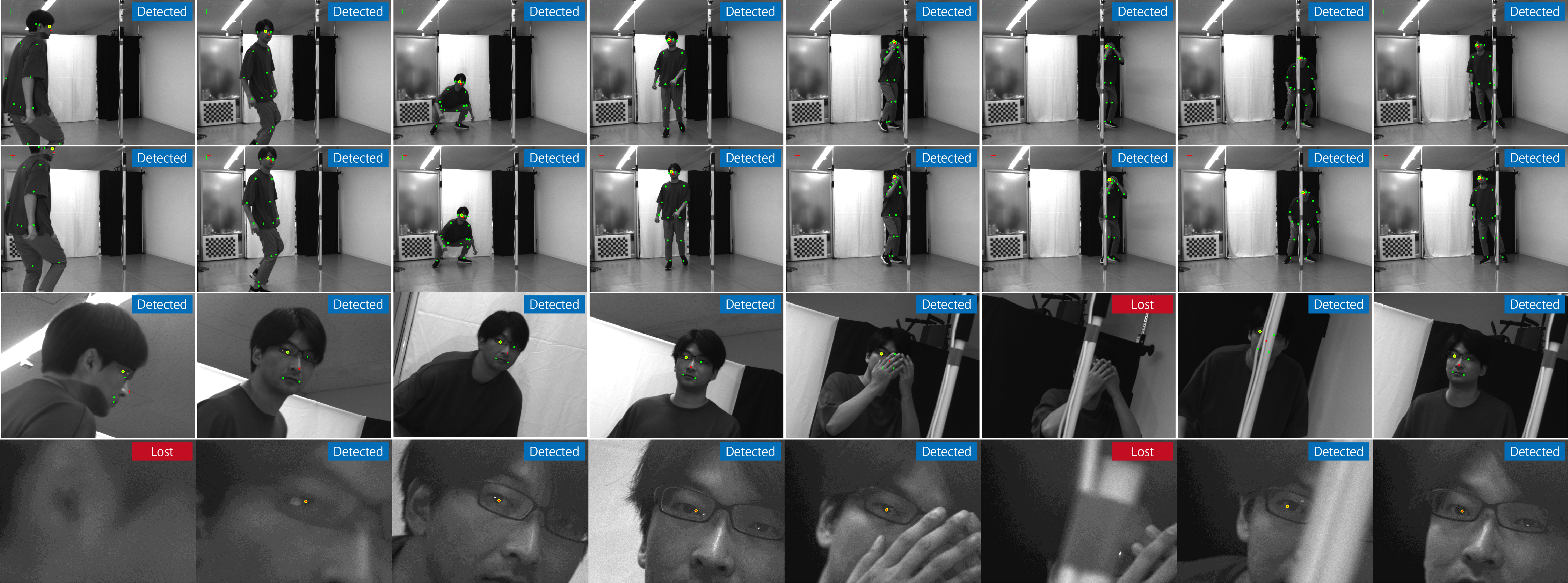
Figure 3 shows Saccade Argos is three-dimensionally tracking the human body by wide-FOV stereo cameras at about 40fps, the face by a mid-FOV pan-tilt camera at about 70fps, and the right eye by a tele-FOV pan-tilt camera at 1,000fps. Even when the face and the eye are lost due to occulusion, the wide-FOV system tells the other tracking systems positions of their targets, and so they can keep observing approximate location of the targets, enabling seamless tracking when they reappear.
 |
 |
 |
References
- Leo Miyashita and Masatoshi Ishikawa: Saccade Argos: Hierarchical Robust Tracking System for High Spatio-temporal Resolution Vision, International Symposium on System Integration (SII2025), pp.811-816, Munich, Germany, 21-24 Jan. (2025)