


ホーム >
システム ビジョン デザイン > Analysis-by-Synthesis法を用いた三次元物体姿勢推定
Analysis-by-Synthesis法を用いた三次元物体姿勢推定
概要
既知物体の姿勢推定は対象物体に対してマシンビジョンシステムが行動を取る為の第一段階であり, 様々な手法が提案され,実システムに広く応用されている. しかしビジョンシステムは一般に計算量が大きく,実用的な処理時間で姿勢を推定するためには様々な制約が必要となる. そのため,現時点では二次元画像認識の利用が主流であり, 三次元の位置姿勢を推定するには適切な初期値を与えて探索範囲を狭めるか, 初めの位置姿勢を既知としてトラッキングを行う手法が多い. 手法も材質や光源,オクルージョンなどの条件に対して特化していることが多いため, 様々な問題に対して一つの手法で対処することが難しいという問題がある.
そこで我々は,三次元モデルが既知の物体の位置姿勢推定にAnalysis-by-Synthesis(A-b-S)法を利用し, Computer Graphics(CG)による予測画像の描画と入力画像とのマッチングにGraphics Processing Unit(GPU)の能力を積極的に活用する手法を提案した. A-b-S法によって,モデルの情報から逆問題として解くことが難しい材質や光源等の条件を,合成した画像上で探索的に扱うことが出来る.
本手法により,複雑な背景のある入力画像とGPUでレンダリングした予測画像のエッジ画像同士のマッチングによって毎秒964,207個の姿勢を評価し, テクスチャの少ない三次元物体の位置姿勢推定を約1分半で行えることを実験で確認した.
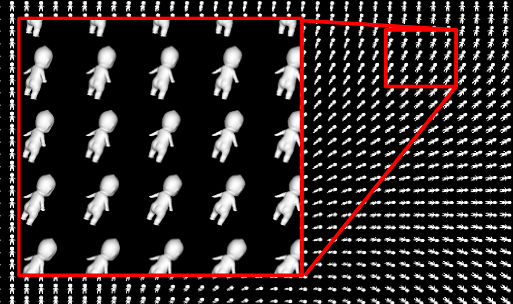
Fig. 1 GPUによってレンダリングした予測画像群
 |
 |
| Fig. 2 複雑な背景を持つ入力画像 | Fig. 3 位置姿勢推定結果 |
参考文献
- 望戸雄史,渡辺義浩,小室孝,石川正俊: Analysis-by-Synthesis法を用いた三次元物体姿勢推定手法のGPUによる実装, 第16回画像センシングシンポジウム(横浜,2010.6.11)/講演論文集 IS4-17.
- 望戸雄史,渡辺義浩,小室孝,石川正俊: CGとGPUを用いた三次元物体の姿勢推定, 第12回画像の認識・理解シンポジウム (松江, 2009.7.22)/論文集, pp. 1653-1660(IS3-41)