


3D Object Pose Estimation using an Analysis-by-Synthesis Method
Summary
We propose a new method for 3D object pose estimation using the analysis-by-synthesis (A-b-S) method. This method is applicable to machine vision systems for 3D object recognition and generalized in terms of the operating conditions, such as materials and lighting. An A-b-S approach usually requires a number of computations so large that a conventional global search was not applicable. We realized a global search for pose estimation by an effective algorithm using a coarse-to-fine strategy and a weak perspective projection assumption. We implemented this method and maked full use of both the rendering and computing power of a graphics processing unit (GPU). The system could evaluate 964,207 candidate poses per second and estimate the pose of a textureless 3D object in about one and a half minutes.
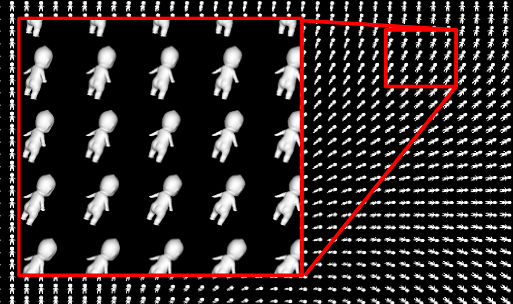
Fig. 1 Candidate images rendered by GPU

|

|
| Fig. 2 Input image | Fig. 3 Result |