


ホーム >
システム ビジョン デザイン > 移動量微小仮定に基づくPoint Cloud型3次元トラッキングの高速化
移動量微小仮定に基づくPoint Cloud型3次元トラッキングの高速化
概要
6自由度の剛体運動の取得(以下, 3次元トラッキング)は, コンピュータビジョンやユーザインタフェースの分野において重要な技術である. 特に, システムや対象が高速に運動する自動車やロボット, 運動物体に対するプロジェクションマッピングなど, 速いフィードバックが必要となる場合, その高速性が重要である. また, 接触型のセンサやマーカを用いた従来の計測システムは対象への設置による拘束が必要であり, 不特定の対象に適用することはできないため, 非接触かつマーカレスな3次元トラッキングを実現することが重要である.
そのため, Point Cloudを用いた形状ベースの3次元トラッキングに着目する. しかし, これまでも様々なアプローチで実現されているが, 形状間で対応する点を探索する処理の計算量が多く, 速度は数十fps程度が限界であった.
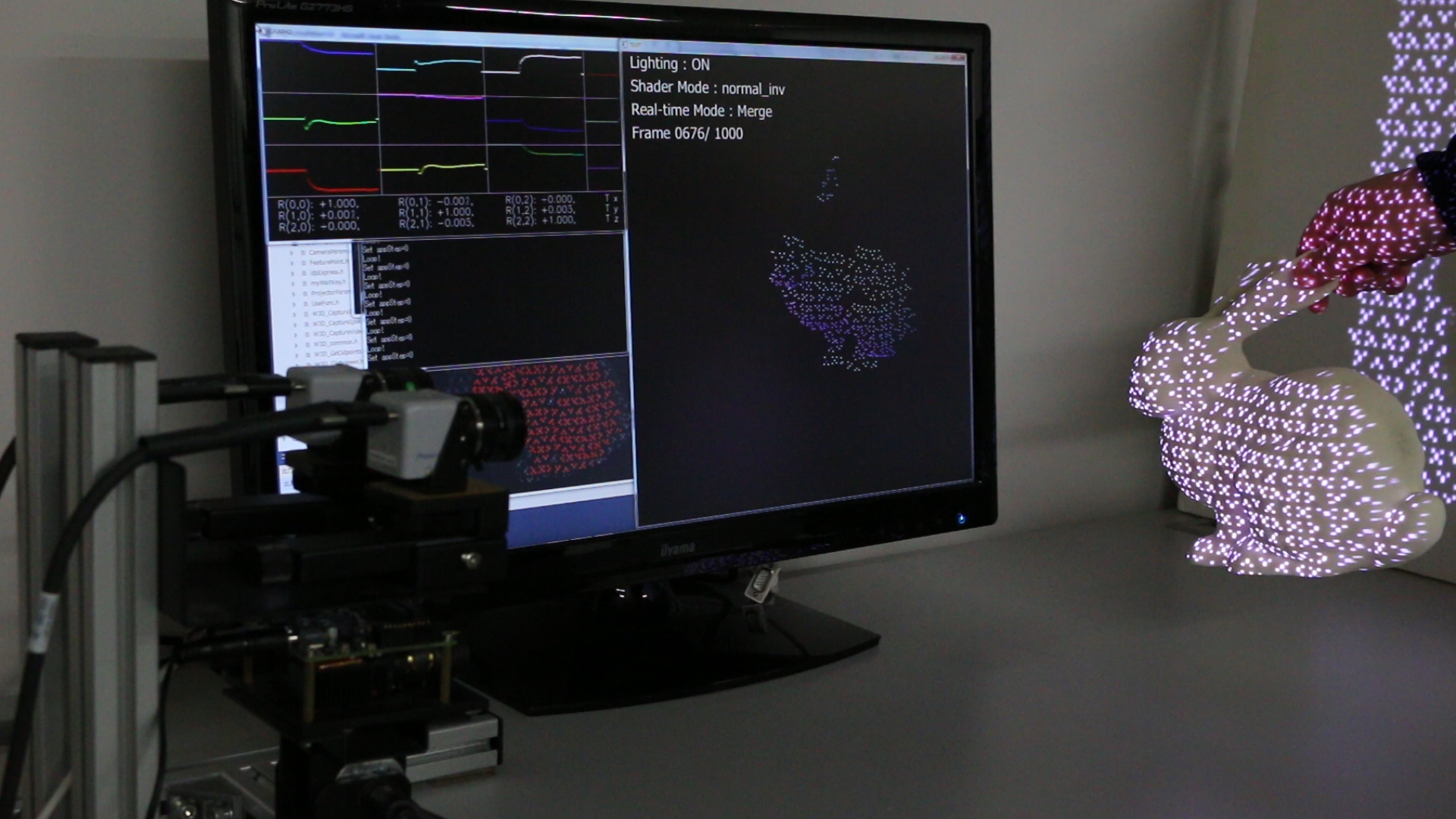
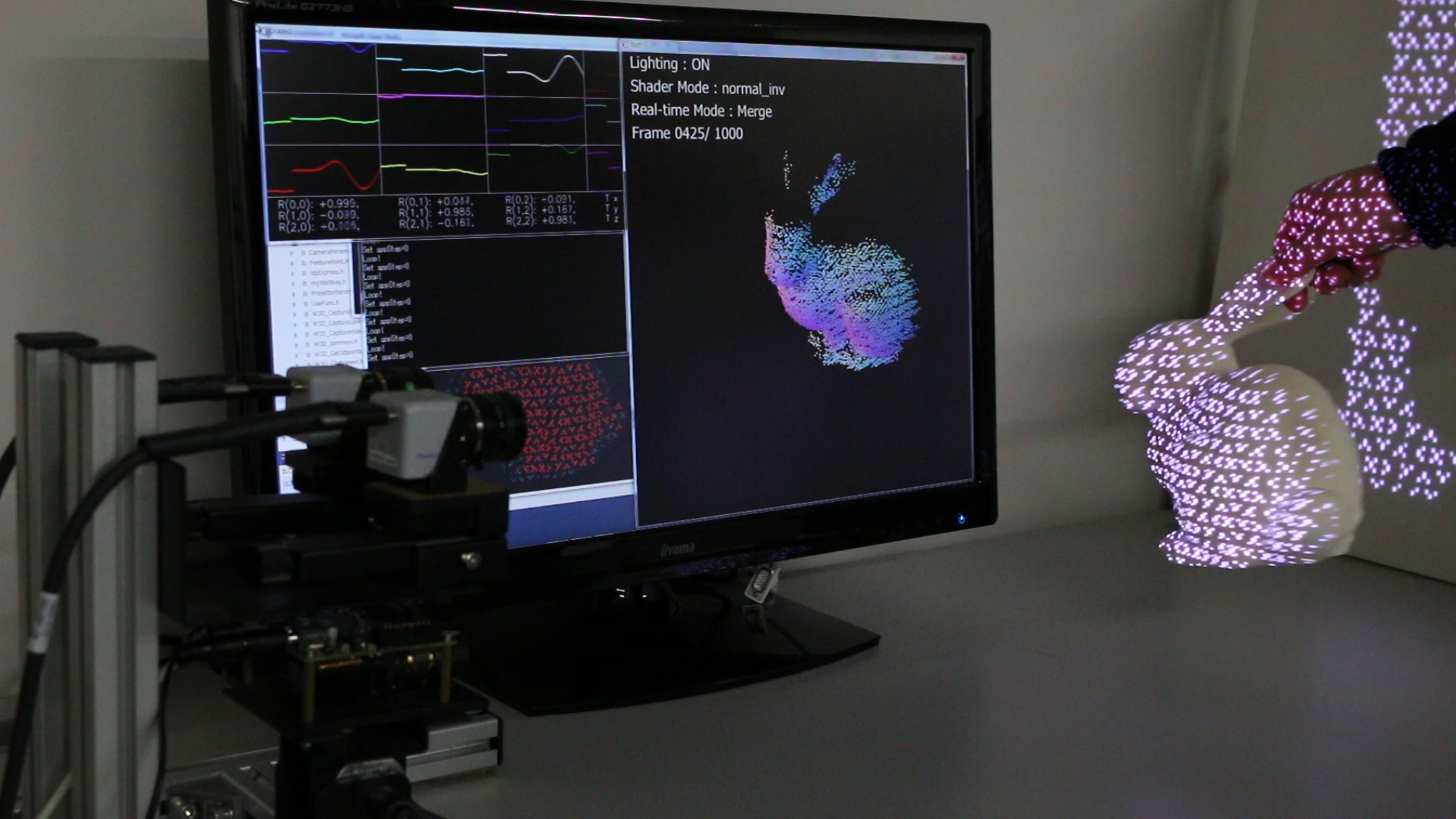
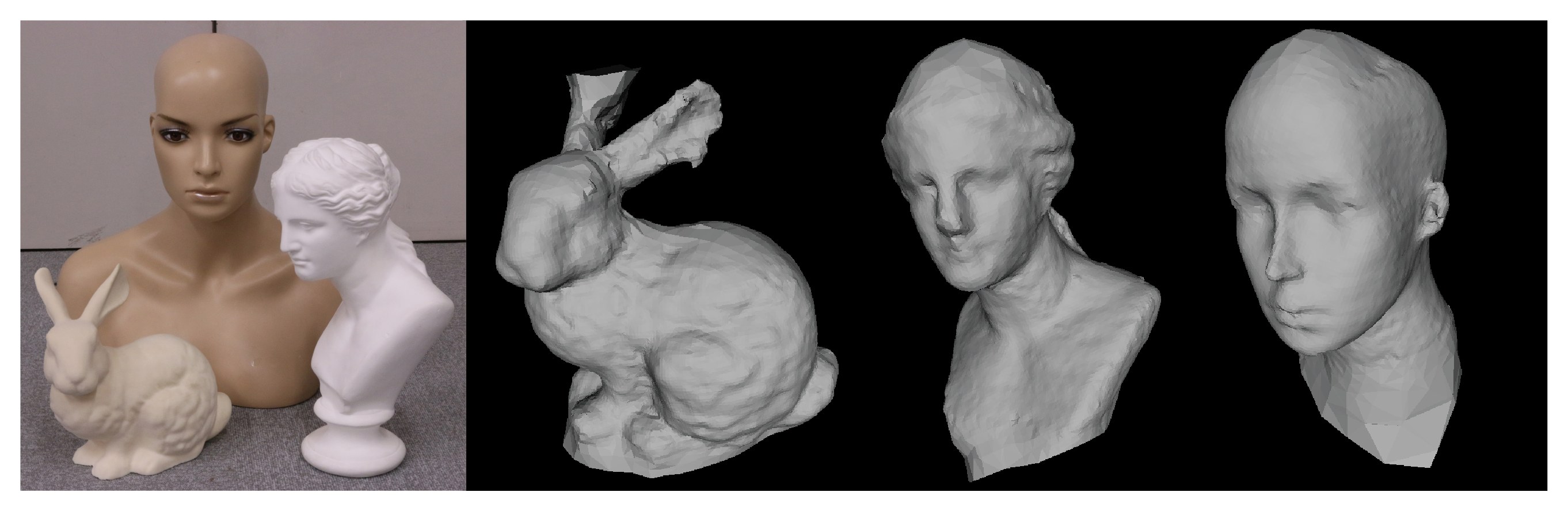
そこで, 本研究では, Point Cloudを取得する3次元計測のサンプリングレートが高い場合, 計測間の移動量が小さいことに着目する. 特に, 構造化光法による3次元計測手法を用いる場合に, 連続する計測においてプロジェクタ射影面上の同一点で計測される点は物体表面の同一平面上にあると仮定する. このとき, 従来, 探索処理と反復処理によって求めていた対応点を確定的に取得することができる. これによって, 剛体運動を1ms以下で取得できる. また, 本システムで得られた運動情報の応用例として, 高速3次元計測によるPoint Cloudの形状統合を行い, 本手法の有用性を示した.
参考文献
- 田畑智志, 渡辺義浩, 石川正俊: 移動量微小仮定に基づくPoint Cloud型3次元トラッキングの高速化, 電子情報通信学会論文誌 D, Vol.J101-D, No.12, pp.1539-1550 (2018)
- 田畑智志, 渡辺義浩, 石川正俊: 移動量微小仮定に基づく対応点探索の効率化によるPoint Cloudベース3次元トラッキングの高速化, 第16回情報科学技術フォーラム(FIT2017)(東京, 2017.9.12), 講演論文集 第3分冊 CH-003, pp.11-16