


High-speed 6-DoF Tracking with Sequential Point Clouds Based on the Small-Displacement Assumption
Summary
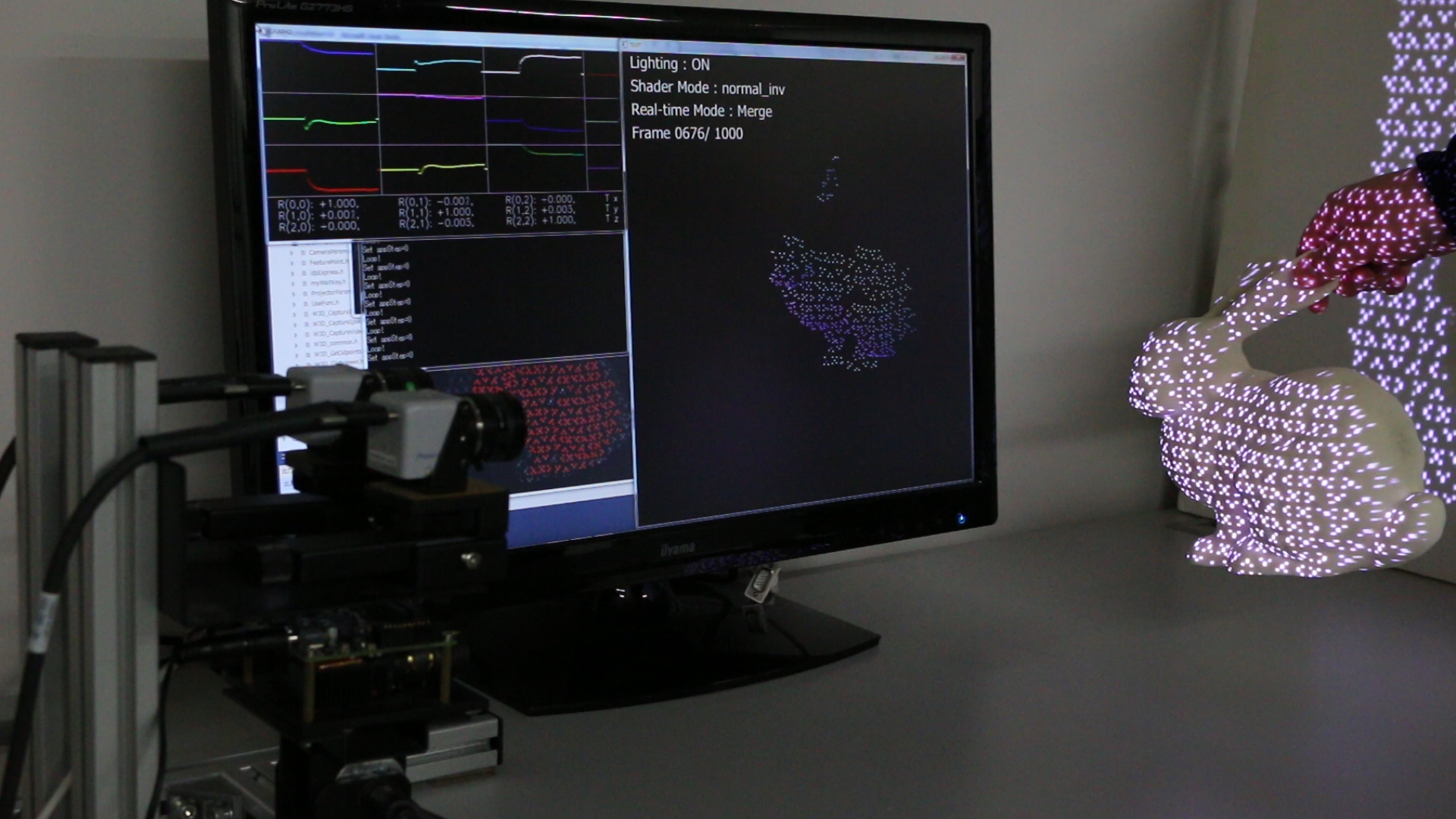
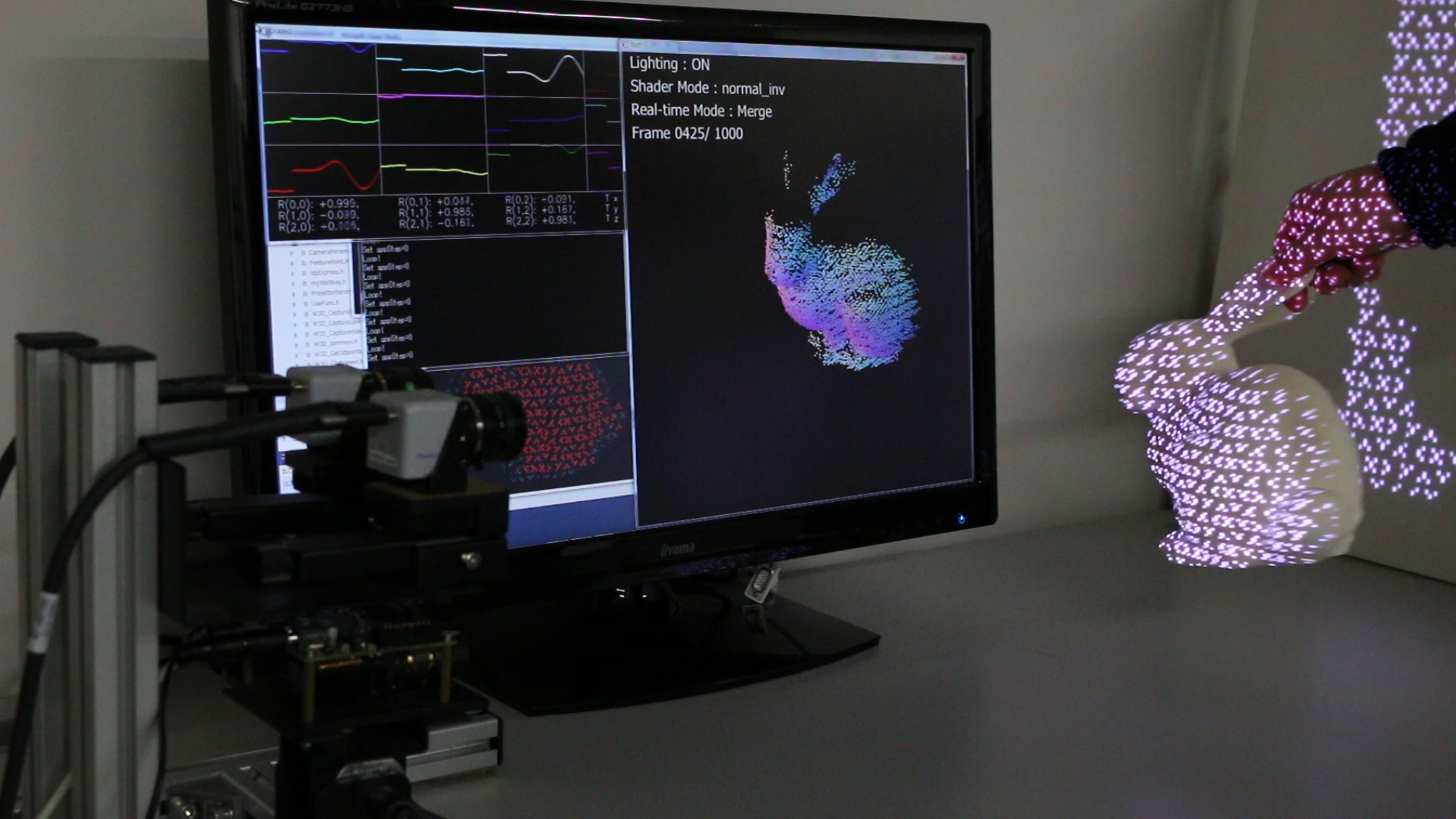
We propose a fast 3D tracking method using Point Clouds. Object motion information is being used in various applications. Especially, markerless high-speed tracking is important for various applications, such as robotics, vehicle systems, automatic inspection, man-machine interfaces, sports science, and so on.
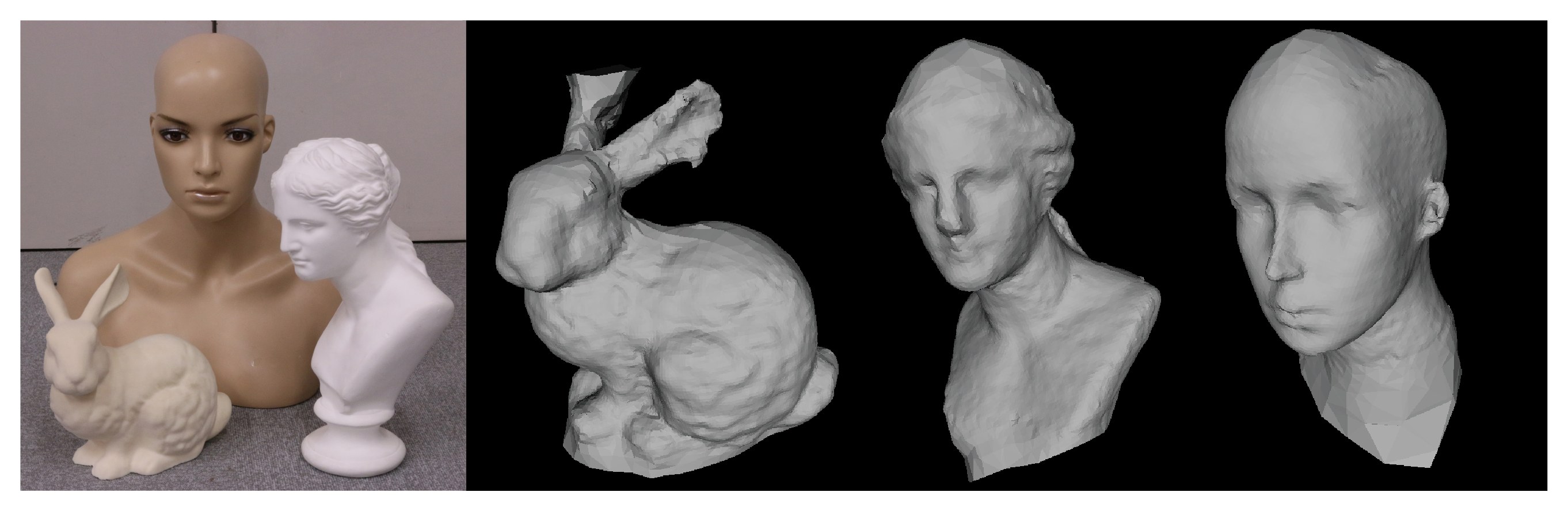
However, In the conventional method, the high calculation cost of corresponding points search prevents that apply to high-speed feedback system. Therefore, we focus on the fact that when the sampling rate of 3D measurement is high, the amount of movement is small. Under this condition, it is assumed that same points on the projector projection plane in continuous measurement are on the same plane of the object surface. We applied the proposed method to simulation and actual measurement data and confirmed that tracking was possible within 1 ms. Using this technique, we also demonstrated 3D shape integration.
References
- Satoshi Tabata Yoshihiro Watanabe, and Masatoshi Ishikawa: High-speed 6-DoF Tracking Based on Small-Displacement Assumption, IEICE Transactions on Information and Systems (Japanese Edition), Vol.J101-D, No.12, pp.1539-1550 (2018) (Japanese)