


適応的三次元形状計測に基づくUAVの不整地への安全着陸に向けた高速脚制御システム
概要
物資輸送や測量,探査を行う無人航空機 (UAV) にとって安全着陸システムは重要であり,特に,形状が未知の不整地へ安全に着陸する自律システムはUAV の活動領域を拡大する上で必要となります.しかし,自律的な着陸を目指した従来手法の多くは,広範囲を計測して安全に着陸可能な領域を検出し,危険を伴う領域を回避するまでに留まっており,不整地への着陸は考慮されていませんでした.
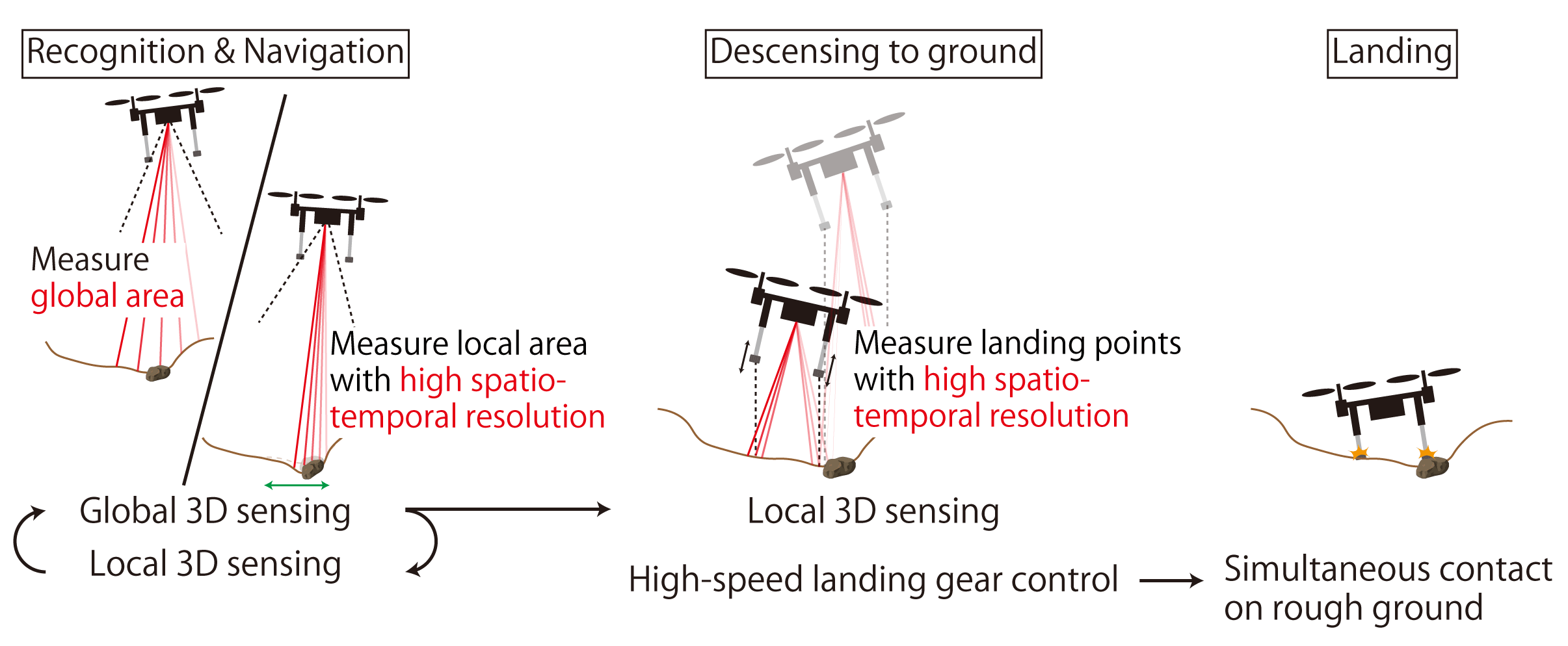
本研究では,UAV の不整地への安全着陸に向けて,適応的な三次元形状計測に基づく高速脚制御システムを提案しました.このシステムは,適応的三次元形状計測と高速脚制御で構成されています.
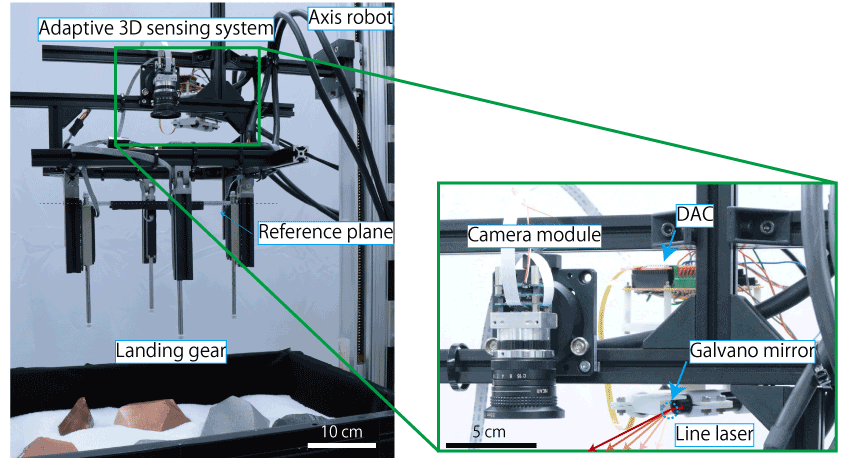
1. 適応的三次元形状計測適応的三次元形状計測は,ビジョンチップ搭載の高速カメラ,ガルバノミラー,ラインレーザーを用いて構成されています.光切断法によって,レーザーが映る画像から三次元形状計測を行い,ガルバノミラーを高速に制御して形状計測を行う領域を適応的かつ高速に変更します.着陸脚が接地する領域や動体が検出された領域に計測範囲を絞ることで,その領域に対しての計測の時空間分解能を向上させます.
2. 高速脚制御適応的三次元形状計測によって計測された高時空間分解能の地面形状を基に,1軸の着陸脚の長さを空中でリアルタイムに制御します.全ての着陸脚を同時に接地させることによって接地時の不安定性を緩和し,起伏のある地面に対しても安定した着陸を実現することを目指します.
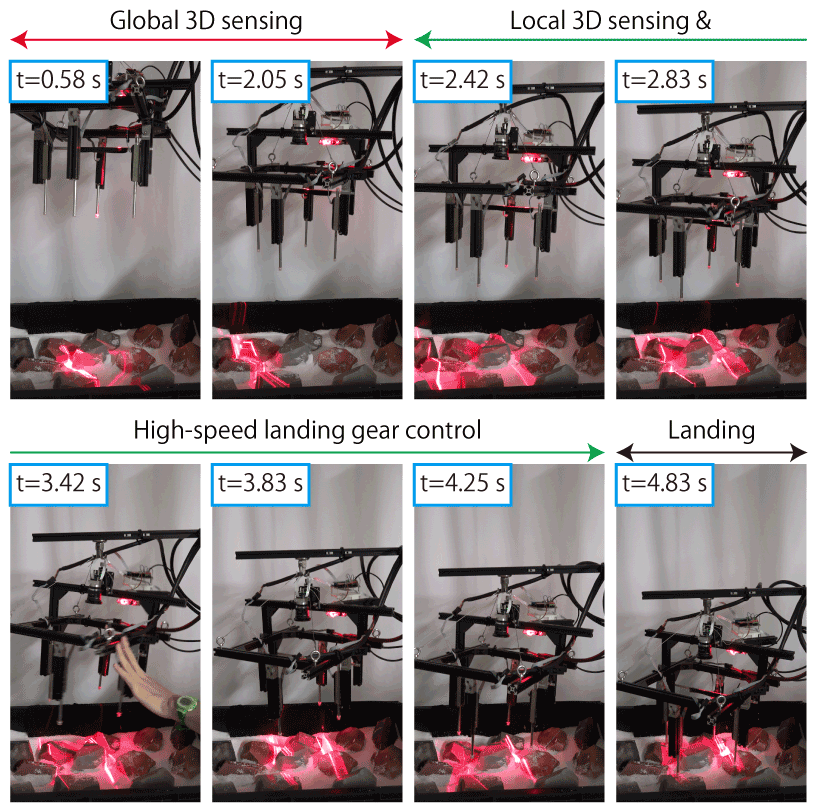
今回提案するシステムを用いたミッションシナリオの一例を示します(図1).そしてビジョンチップ搭載の高速カメラとレーザー,ガルバノミラー,そして1軸の着陸脚を用いて実験装置を構築しました(図2).小型軽量低電力のビジョンチップによって1000fpsによる高速低遅延での画像取得から処理を行うことで,着陸脚を高速に制御することが可能になりました.姿勢自由における着陸模擬実験では,外乱で姿勢が変動しても,高時空間分解能の計測結果によって即座に着陸脚の長さを更新し,最終的に全ての着陸脚が同時に接地するように着陸しました(図3).
 |
 |
 |
参考文献
- Mikihiro Ikura, Leo Miyashita, Masatoshi Ishikawa: Real-time Landing Gear Control System Based on Adaptive 3D Sensing for Safe Landing of UAV, 2020 IEEE/SICE International Symposium on System Integration (SII2020), Honolulu, Hawaii, USA, 12-15 Jan 2020.