


Real-time Landing Gear Control System Based on Adaptive 3D Sensing for UAV Safe Landing on Rough Ground
Summary
A safe landing system is important for Unmanned Aerial Vehicles (UAVs) to transport parcels, survey land, and explore an unknown area. In particular, an autonomous safe landing system on rough ground with an unknown shape is critical to expand a flying area. However, some conventional systems for autonomous landing do not consider landing on rough ground even though they can detect some safe areas for landing by measuring a wide area.
In this research, we proposed a real-time landing gear control system based on adaptive and high-speed 3D sensing for UAV safe landing on rough ground. This proposed system consists of the adaptive 3D sensing and the high-speed landing gear control.
1. Adaptive 3D sensingThe adaptive 3D sensing system consists of a high-speed camera equipped with a vision chip, galvanometer mirror, and line laser. The system performs the 3D sensing by light section method using an image in which the line laser is irradiated. The system changes the measurement area adaptively and at high speed by controlling the angle of the galvanometer mirror. By focusing the measurement area on landing points or motion detected area, the spatio-temporal resoluion of the measurement can be improved.
2. High-speed landing gear controlBased on the measurement result from the adaptive 3D sensing without touching the ground, lengths of the landing gears are controlled in real time in the sky. Then, all landing gears contact the ground simultaneously. This simultaneous contact reduces the instablity at touchdown and realizes a safe landing even on rough ground.
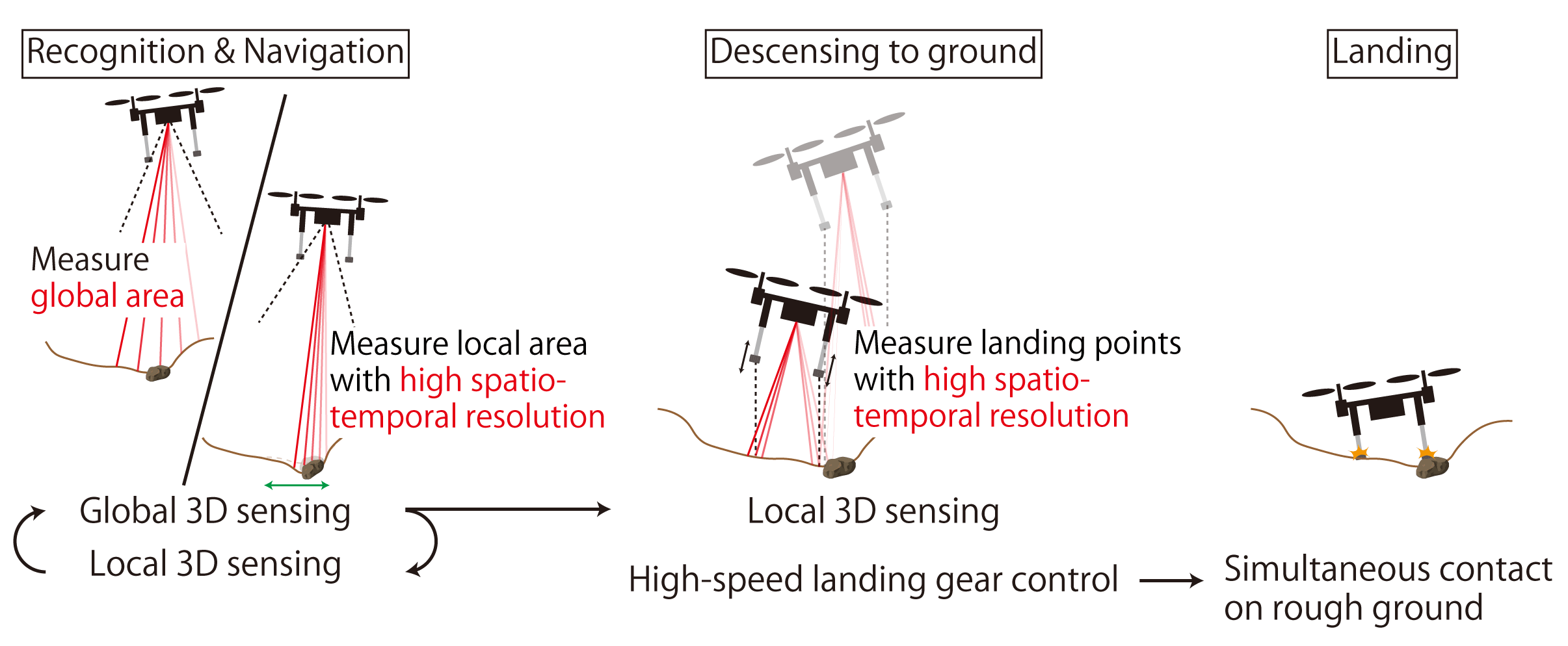
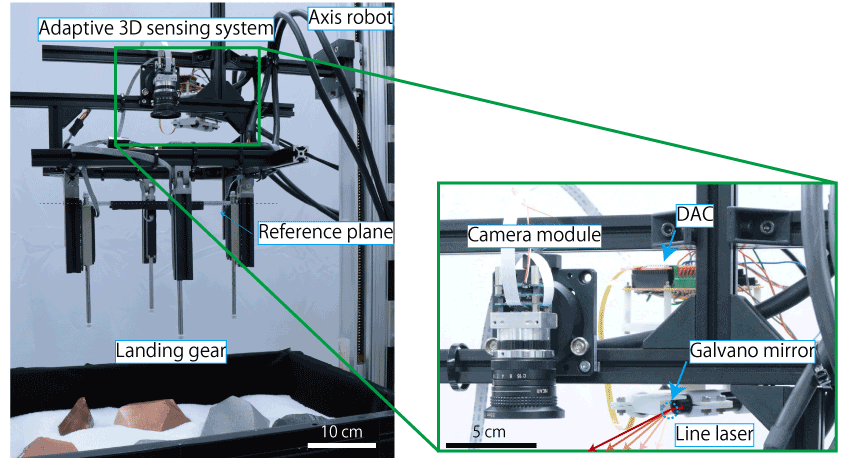
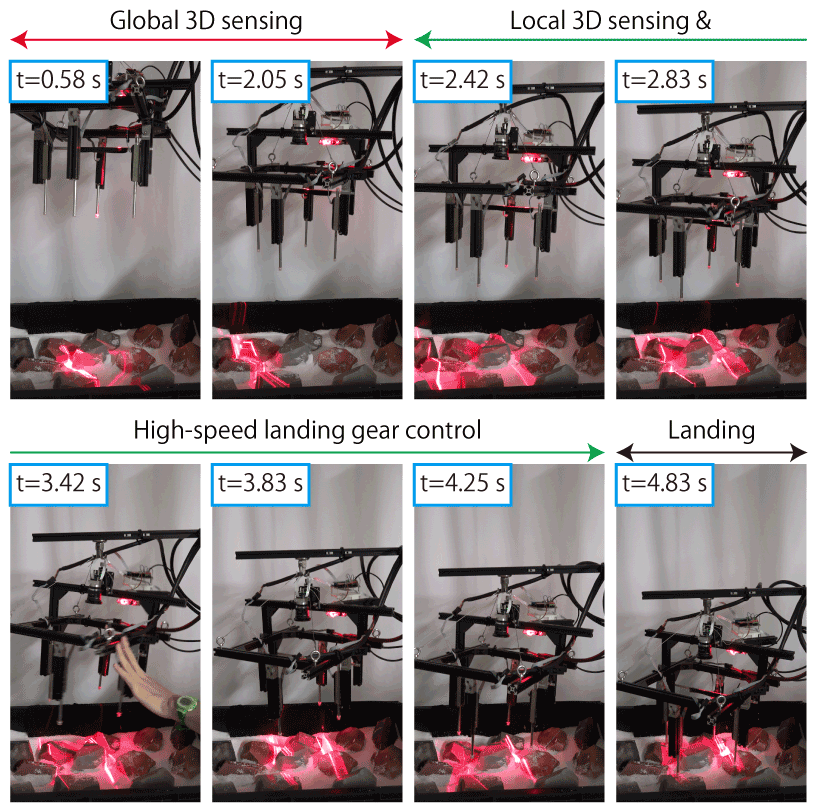
The mission scenario with the proposed system is shown in Fig. 1. The experimental configuration consists of a high-speed camera with a vision chip, a line laser, a galvano mirror, and one-axis landing gears as shown in Fig. 2. By obtaining and processing an image at 1000 fps at high speed and low latency with a compact, lightweight, and low-power vision chip, the landing gears can be controlled at high speed. In a landing demonstration with unstable attitude, the lengths of the landing gears were updated immediately with the measurement result, and finally all landing gears contacted the ground almost simultaneously as shown in Fig. 3.
 |
 |
 |
References
- Mikihiro Ikura, Leo Miyashita, Masatoshi Ishikawa: Real-time Landing Gear Control System Based on Adaptive 3D Sensing for Safe Landing of UAV, 2020 IEEE/SICE International Symposium on System Integration (SII2020), Honolulu, Hawaii, USA, 12-15 Jan 2020.