


ホーム >
システム ビジョン デザイン > 多視点レーザー計測による任意物体の6自由度運動センシング
多視点レーザー計測による任意物体の6自由度運動センシング
概要
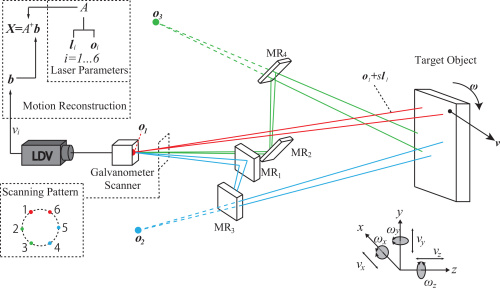
任意物体の剛体運動を非接触で計測をするために, 多重化レーザーを用いた3次元運動計測手法が提案されています.しかし,単眼のシステムから全ての運動成分を高精度に推定することは困難でした. 本研究では,レーザー計測による運動推定手法を数学的に解析し,多自由度の計測が可能となる条件を特定しました. この条件を元に、剛体運動6自由度の運動を計測可能な多視点システムを提案しました.
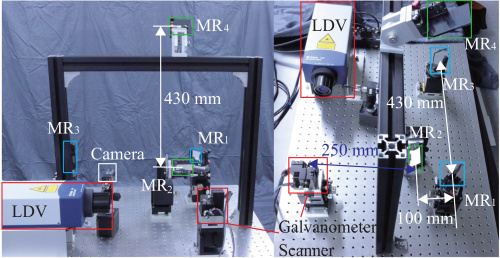
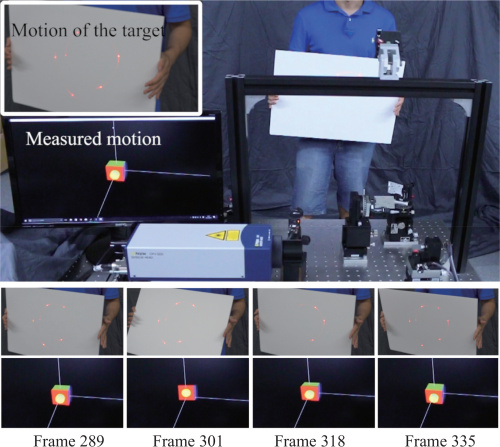
再定式化によって,複数のレーザー計測による6自由度運動速度の計算がレーザー計測器の配置のみに依存する線形システムであることが示されます. その線形システムの階数と条件数を分析し,視点数が3以上であることが6自由度計測の必要条件であると明らかになりました. また,条件数がシステムのパラメータだけに依存するため,応用環境を制限することにより, 計測に最適な計測システムの配置や構成を数値分析とシミュレーションから求めることが可能です. さらに,本手法に基づいて多視点のシステムを設計し,構成した結果, 高速度かつ高精度に6自由度の計測が実現され,本手法の有用性が確認されました.
参考文献
- Yunpu Hu, Leo Miyashita, Yoshihiro Watanabe, and Masatoshi Ishikawa, "Robust 6-DOF motion sensing for an arbitrary rigid body by multi-view laser Doppler measurements," Opt. Express 25, 30371-30387 (2017)
- L. Miyashita, R. Yonezawa, Y. Watanabe and M. Ishikawa : 3D Motion Sensing of any Object without Prior Knoledge, SIGGRAPH Asia 2015, Technical Papers, Kobe, Japan, 2-5 Nov. (2015)