


Robust 6-DOF Motion Sensing for an Arbitrary Rigid Body by Multi-view Laser Doppler Measurements
Summary
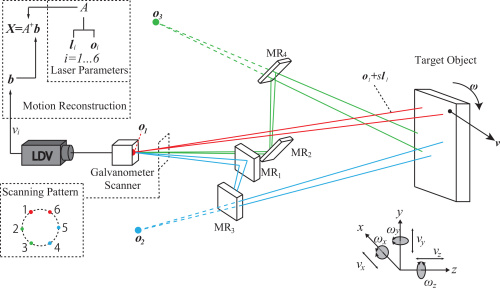
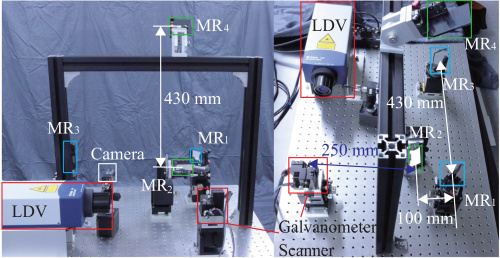
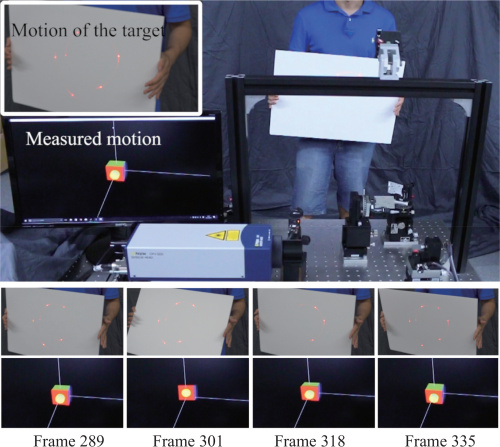
We propose a novel method for the robust, non-contact, and six degrees of freedom (6-DOF) motion sensing of an arbitrary rigid body using multi-view laser Doppler measurements. The proposed method reconstructs the 6-DOF motion from fragmentary velocities on the surface of the target. It is unique compared to conventional contact-less motion sensing methods since it is robust against lack-of-feature objects and environments. By discussing the formulation of motion reconstruction by fragmentary velocities, we show that the reconstruction problem is a strict linear problem whose parameters are only related to the arrangement of the lasers. Besides, with analyzation on the matrix rank, we confirm that a multi-view system with at least three viewpoints will strongly benefits the 6-DOF rigid body motion reconstruction. We explain this by introducing the condition number of the measurement matrix, and consider it to be the most important factor in the system design. The proposed method is validated under a optimized system setup, composed of a laser Doppler Velocimeter, a beam controller and four laser reflectors.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
References
- Yunpu Hu, Leo Miyashita, Yoshihiro Watanabe, and Masatoshi Ishikawa, "Robust 6-DOF motion sensing for an arbitrary rigid body by multi-view laser Doppler measurements," Opt. Express 25, 30371-30387 (2017)
- L. Miyashita, R. Yonezawa, Y. Watanabe and M. Ishikawa : 3D Motion Sensing of any Object without Prior Knoledge, SIGGRAPH Asia 2015, Technical Papers, Kobe, Japan, 2-5 Nov. (2015)