


ホーム >
システム ビジョン デザイン > 運動物体形状の高解像度化のためのマルチフレーム同時位置合わせ
運動物体形状の高解像度化のためのマルチフレーム同時位置合わせ
概要
3 次元情報を用いた認識を, ロボット制御, 製品検査, 車載センシング, ヒューマンインターフェースなどで実施する場合, 動的シーンを捉えることが必須の課題となる. このようなニーズに対して, これまでに, 運動中の物体の観測を可能とするリアルタイム3 次元センシングシステムの開発例[link]が報告されているが, 時間方向のサンプリングレートに比べて, 空間方向のサンプリングレートの限界性能が低かった.
そこで, 低解像度の時系列距離画像から, 高解像度の距離画像を復元する統合手法によって, 同問題の解決にあたる. このような時系列距離画像の統合問題は, 3 つのタスクに分解されると考えられる. これは, (A) 3 次元シーンの剛体部分への分解, (B) フレーム間の剛体運動推定による位置合わせ, (C) 3 次元曲面の復元である.
ここでは, (B) のための手法を提案する. 本手法は, 点と平面に関する対応点の選択手法とマルチフレームの位置合わせを同時に最適化する枠組によって, 低解像度データの入力下でも安定した動作が期待できるものとなっている. 検証の結果, 提案手法の動作が正しく行われていることが確認された.
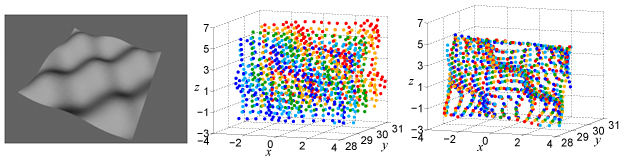
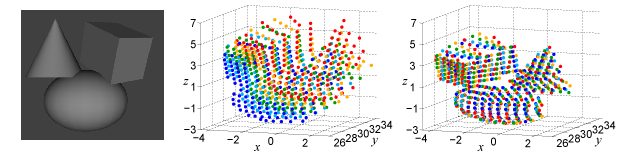

左: レンダリング画像/実験環境, 中: 位置合わせ前, 右: 位置合わせ後
動画
参考文献
- Yoshihiro Watanabe, Takashi Komuro, Masatoshi Ishikawa: Integration of Time-sequential Range Images for Reconstruction of a High-resolution 3D Shape, The 19th International Conference on Pattern Recognition (Florida, 2008.12.8) / Proceedings. [PDF]*IEEE
- 渡辺義浩, 小室孝, 石川正俊: マルチフレーム同時位置合わせに基づく運動物体形状の高解像度化, 第14回画像センシングシンポジウム(横浜,2008.6.13)/講演論文集 IN3-22. [PDF]
- 渡辺義浩, 河野仁, 小室孝, 石川正俊: 運動物体の高分解能3次元センシングに向けた時系列統合の検討, 第25回日本ロボット学会学術講演会 (千葉,2007.9.13) / 予稿集,1N21.