


ホーム >
アクティブ パーセプション >白線認識による画角補償機能を利用した時速 100km 対応トンネル覆工表面画像検査システム
白線認識による画角補償機能を利用した時速 100km 対応トンネル覆工表面画像検査システム
概要
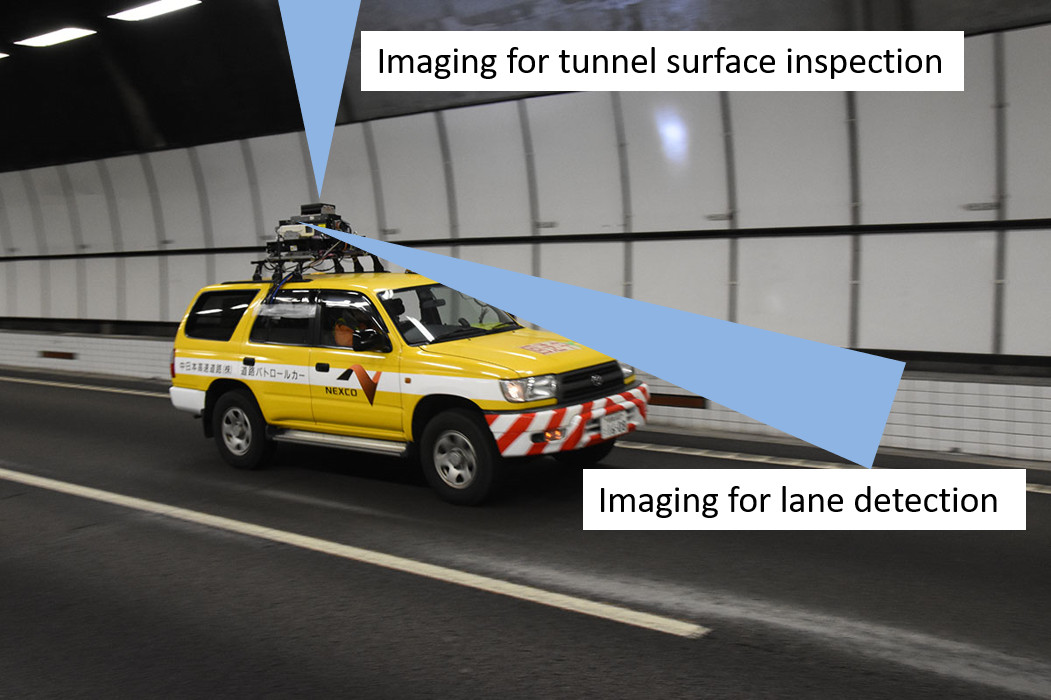
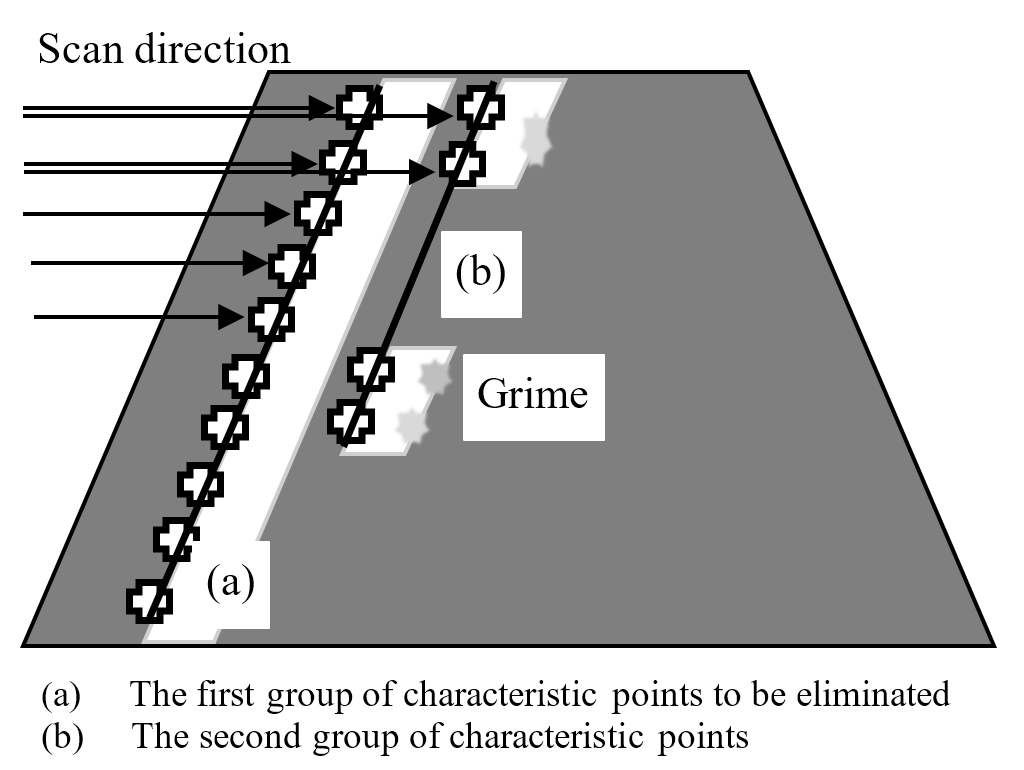
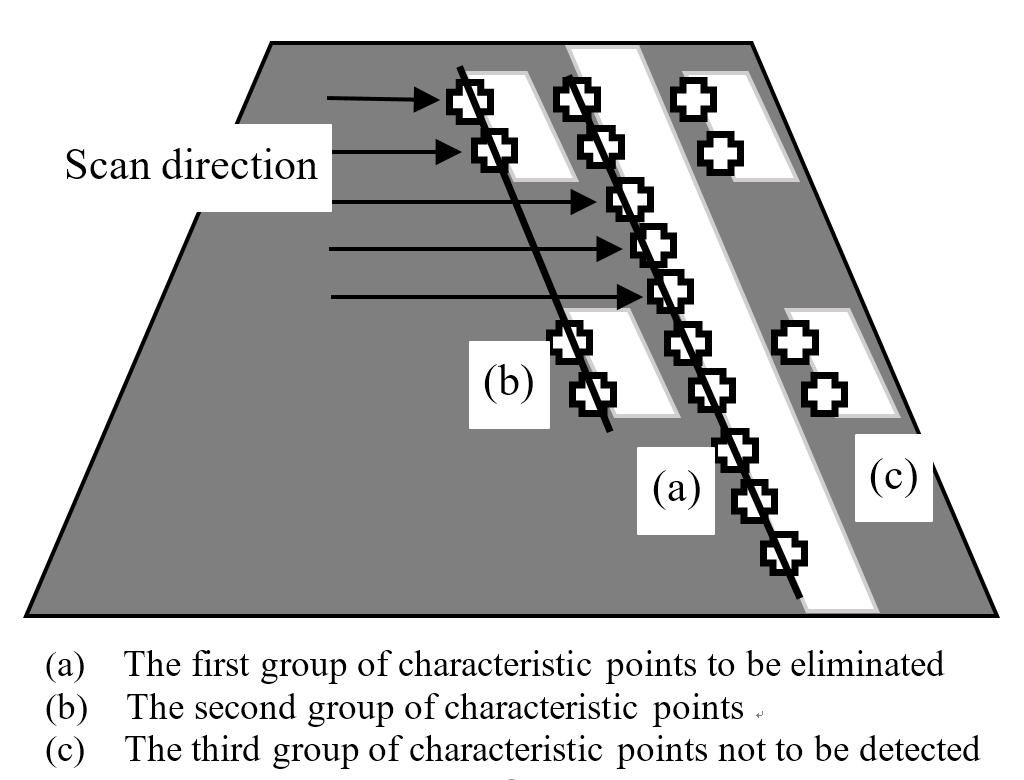
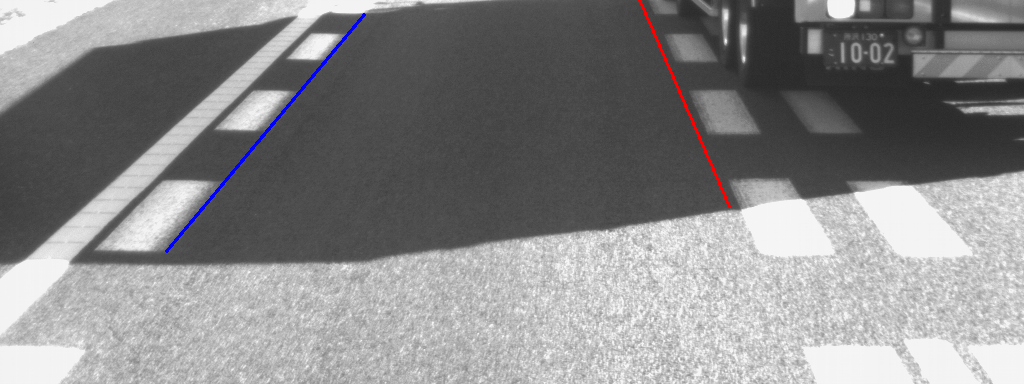
日常的なトンネル表面点検の必要性により,車載型トンネル検査システムを開発した.本研究では,リアルタイムで装置の角度を制御して撮影するために,キャリブレーションなしで自己位置推定を行う手法を提案している.前方に向けた別のカメラを使って白線認識を行い,照明条件の変化や破線状の白線に対応させた.提案手法はトンネル出入り口での照明条件の変化や通常の白線に追加される破線状の白線,タイヤによる白線の汚れに対応しており,従来手法よりも高精度である.
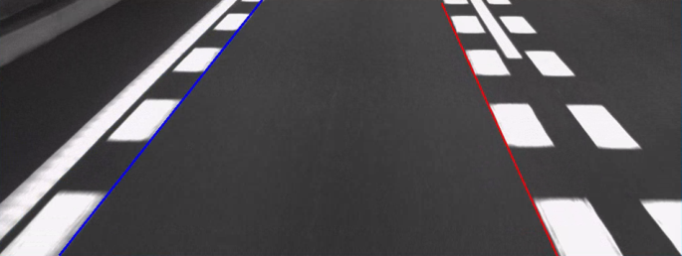
検査車両は車線内で左右に動きながら走行するが,本システムにより常に狙った範囲を撮影することが可能となった.高分解能画像を取得する場合,カメラ台数が少ないと画角が限られてしまうが,この手法を用いて往復走行することで撮像対象の全面が撮像可能となる. 提案手法の処理時間は 1フレーム毎 27.3ミリ秒,白線検出の精度は 97.4% であり,リアルタイムでアクチュエータの補償を行うのに十分な性能を達成した.実際に高速道路のトンネルで実証実験を行い,白線認識の精度改善と安定取得によって時速100kmで走行する通常の車両からトンネル全周画像を取得出来ることを示した.
 |
 |
 |
 |
 |
 |
参考文献
- Tomohiko Hayakawa, Yushi Moko, Kenta Morishita, and Masatoshi Ishikawa: Real-time Robust Lane Detection Method at a Speed of 100 km/h for a Vehicle-mounted Tunnel Surface Inspection System, 2019 IEEE Sensors Applications Symposium (SAS2019) (Sophia Antipolis, 2019.3.11)
- 早川智彦, 望戸雄史, 森下健太, 石川正俊:白線認識による画角補償機能を利用した時速 100km 対応トンネル覆工表面画像検査システム,第16回ITSシンポジウム(京都, 2018.12.14), 4-B-01, 2018. ベストポスター賞