


Real-time Robust Lane Detection Method at a Speed of 100 km/h for a Vehicle-mounted Tunnel Surface Inspection System
Summary
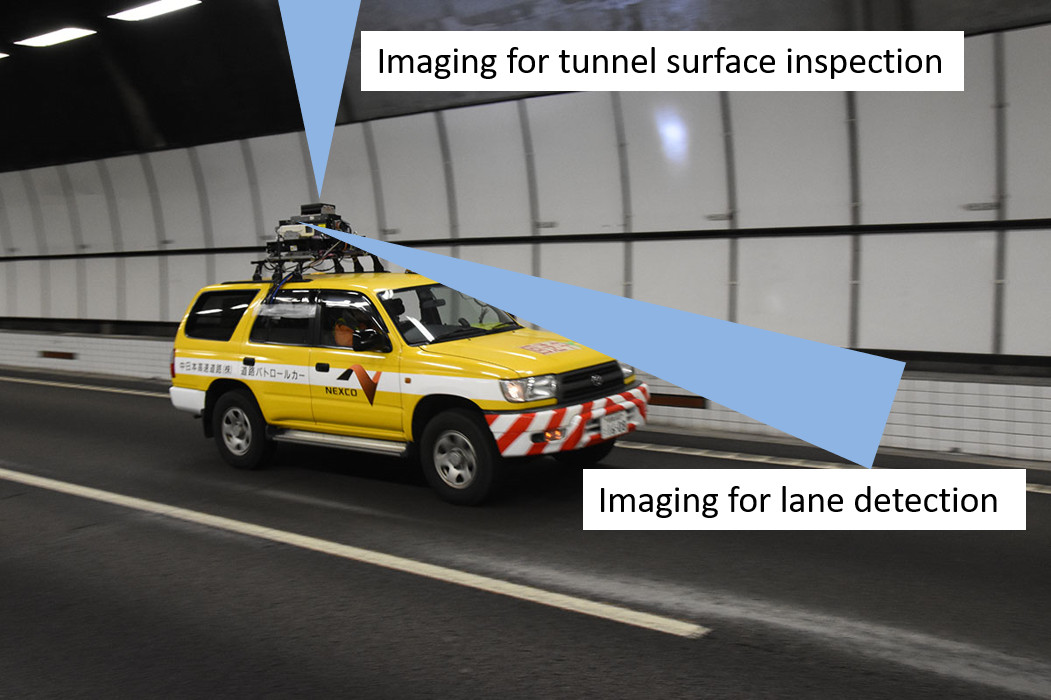
Owing to the need for daily tunnel surface inspections, vehicle-mounted tunnel surface inspection systems have been developed. Vehicles do not travel in the same position at all times; hence, the angle of the captured images varies. We herein propose a calibration-free self-localization method for tunnel surface imaging with a stabilized image angle.
 |
 |
 |
 |
 |
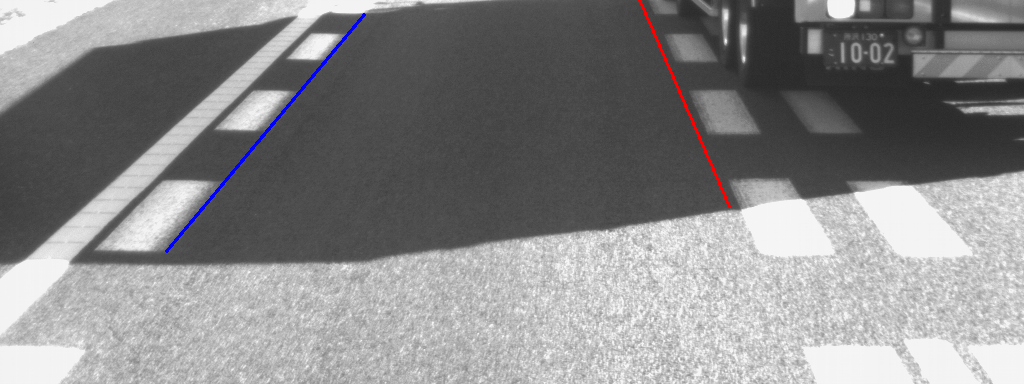 |
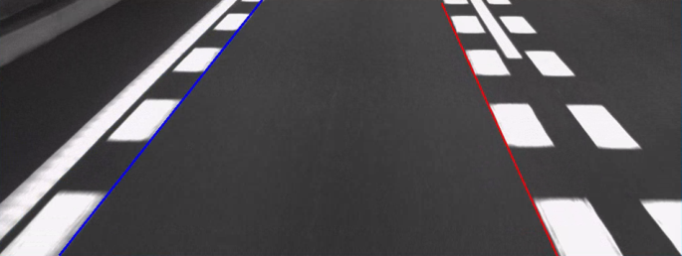
The method is more accurate than the conventional method for challenging environments such as a tunnel with light changes at the exit, additional dotted lines, and tire marks on white lines. Thereby it detects lanes at 97.4 % in 27.3 ms. Those accuracy and speed is enough for real-time compensation. In addition, we performed an actual tunnel inspection experiment in the Kuragaike tunnel and demonstrated that improvements in white-line recognition for the tunnel features to be inspected yielded stable lane detection and whole tunnel surface imaging by a normal vehicle at 100 km/h.
References
- Tomohiko Hayakawa, Yushi Moko, Kenta Morishita, and Masatoshi Ishikawa: Real-time Robust Lane Detection Method at a Speed of 100 km/h for a Vehicle-mounted Tunnel Surface Inspection System, 2019 IEEE Sensors Applications Symposium (SAS2019) (Sophia Antipolis, 2019.3.11)
- Tomohiko Hayakawa, Yushi Moko, Kenta Morishita, and Masatoshi Ishikawa: Real-time Robust Lane Detection Method at a Speed of 100 km/h for a Vehicle-mounted Tunnel Surface Inspection System, 16th ITS Symposium (Kyoto, 2018.12.14), 4-B-01, 2018. Best Poster Award