


ホーム >
アクティブ・パーセプション >人の動作意図に基づく物体把持高速化アシストシステム
人の動作意図に基づく物体把持高速化アシストシステム
概要
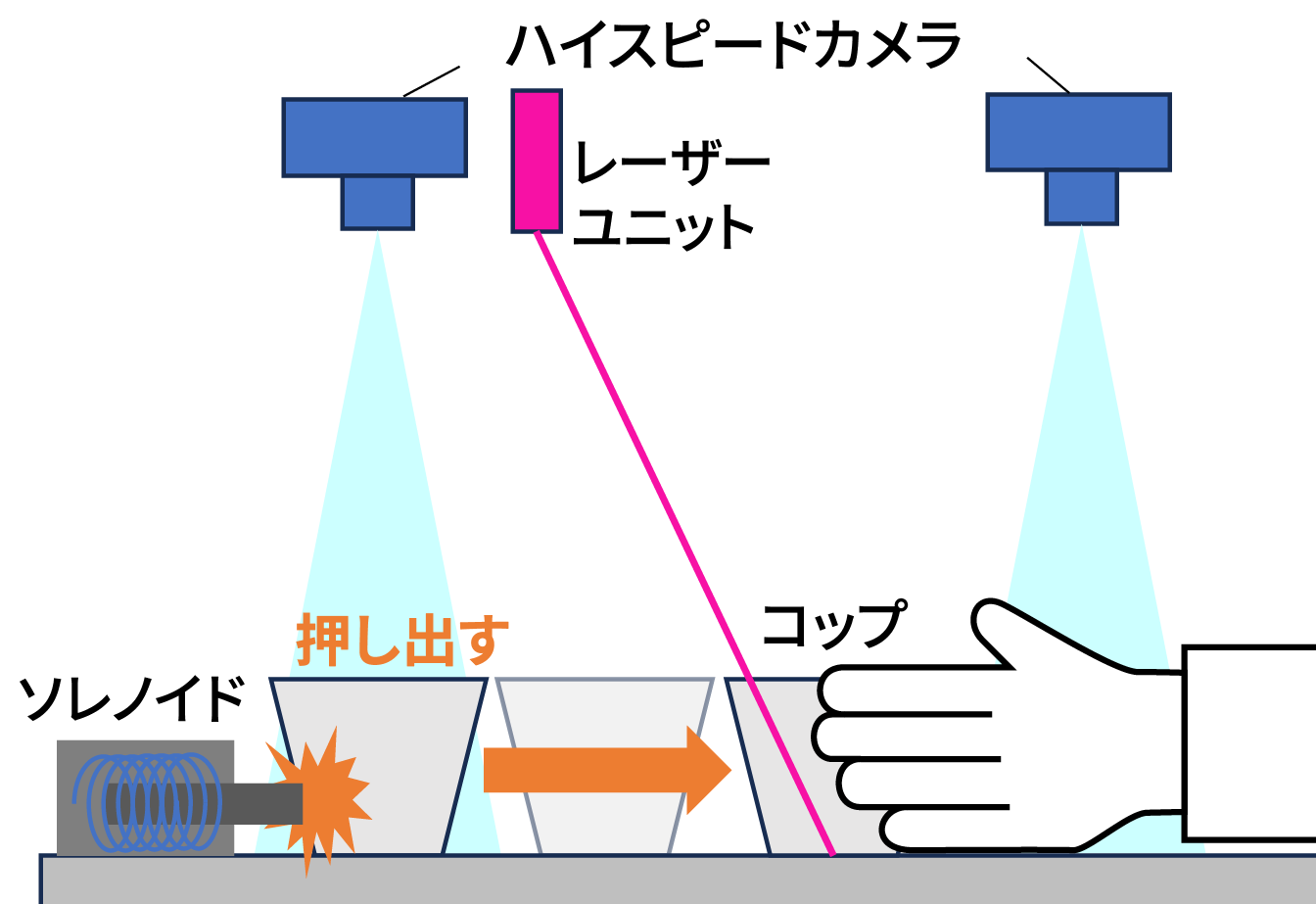
本研究では,ロボットと人が直接接触せずに,人の動作を高速に支援するロボットシステムの開発を目的としている.日常空間において,人が物体を把持する動作を支援するシステムとして提案する.
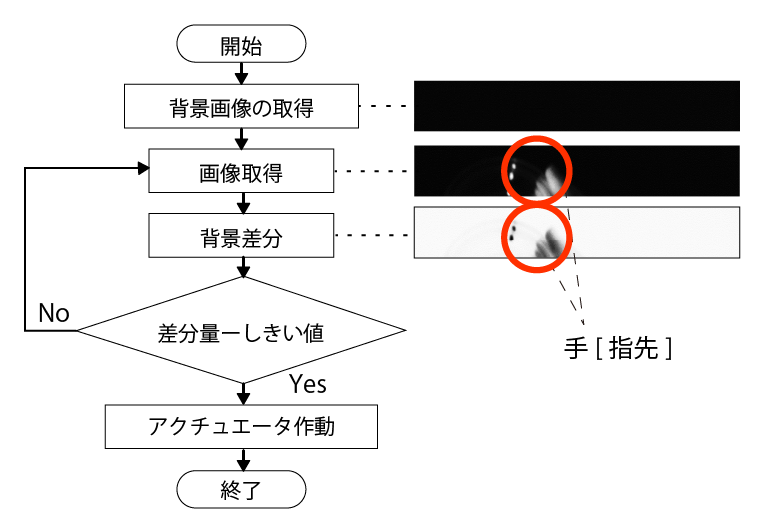
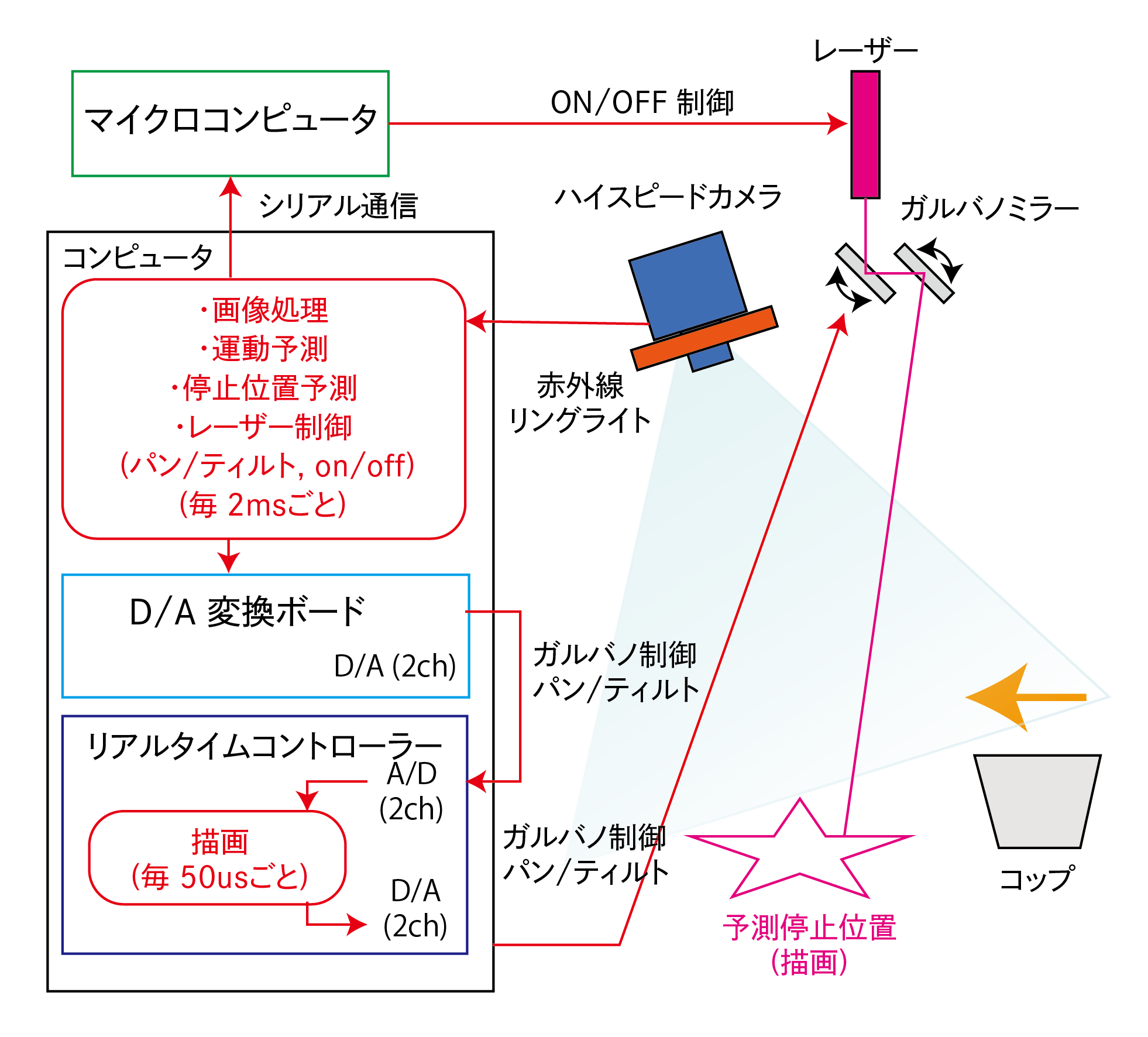
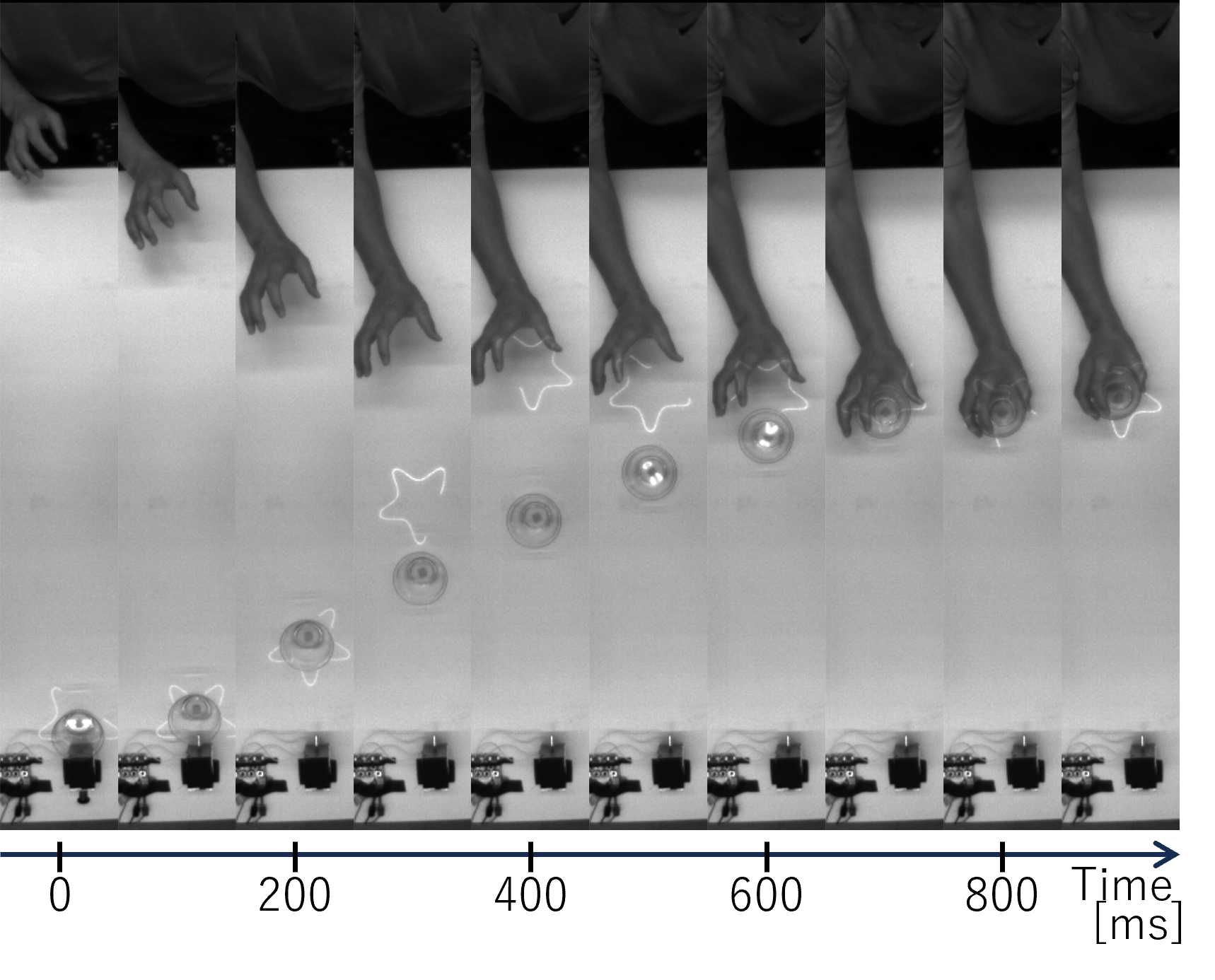
机上での人の動作意図を読み取り,ソレノイドなどのアクチュエータが瞬時に作動することで動作支援を果たす.また,アクチュエータにより押し出された物体の予測停止位置を,高速表示レーザが照射することで,スムーズな動作支援を果たす.
システムを使用することで,システムが無い場合と比べて、より早く物体が把持できることが被験者実験により明らかとなり,システムの有効性が認められた.
 |
 |
 |
 |
参考文献
- 早川 智彦,蛭間 友香,妹尾 拓,黄 守仁,石川 正俊:机上における人の動作意図読み取りによる物体把持高速化アシストシステム, 第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)(岩手,2024.12.19), 講演会論文集,pp.2482-2483
- T. Hayakawa, S. Sueishi, Y. Hiruma, H. Tochioka, T. Senoo, S. Huang, M. Ishikawa, "Object Grasping Assist System with Reading Human Intention and Predicting Object Position", The 11th International Conference on Automation, Robotics and Applications (ICARA 2025), Zagreb, Croatia, 14 Feb (2025)
|
東京理科大学
研究推進機構
総合研究院
石川グループ研究室
Ishikawa Group Laboratory WWW admin: contact Copyright © 2008 Ishikawa Group Laboratory. All rights reserved. |
|