


Home >
Active Perception > Assist System to Accelerate Object Grasping
Assist System to Accelerate Human Object Grasping with a Solenoid Actuator
Summary
The purpose of this research is to develop a robotic system that supports human actions at high speed without direct contact between the robot and the human. We propose a system that supports human grasping actions in daily life.
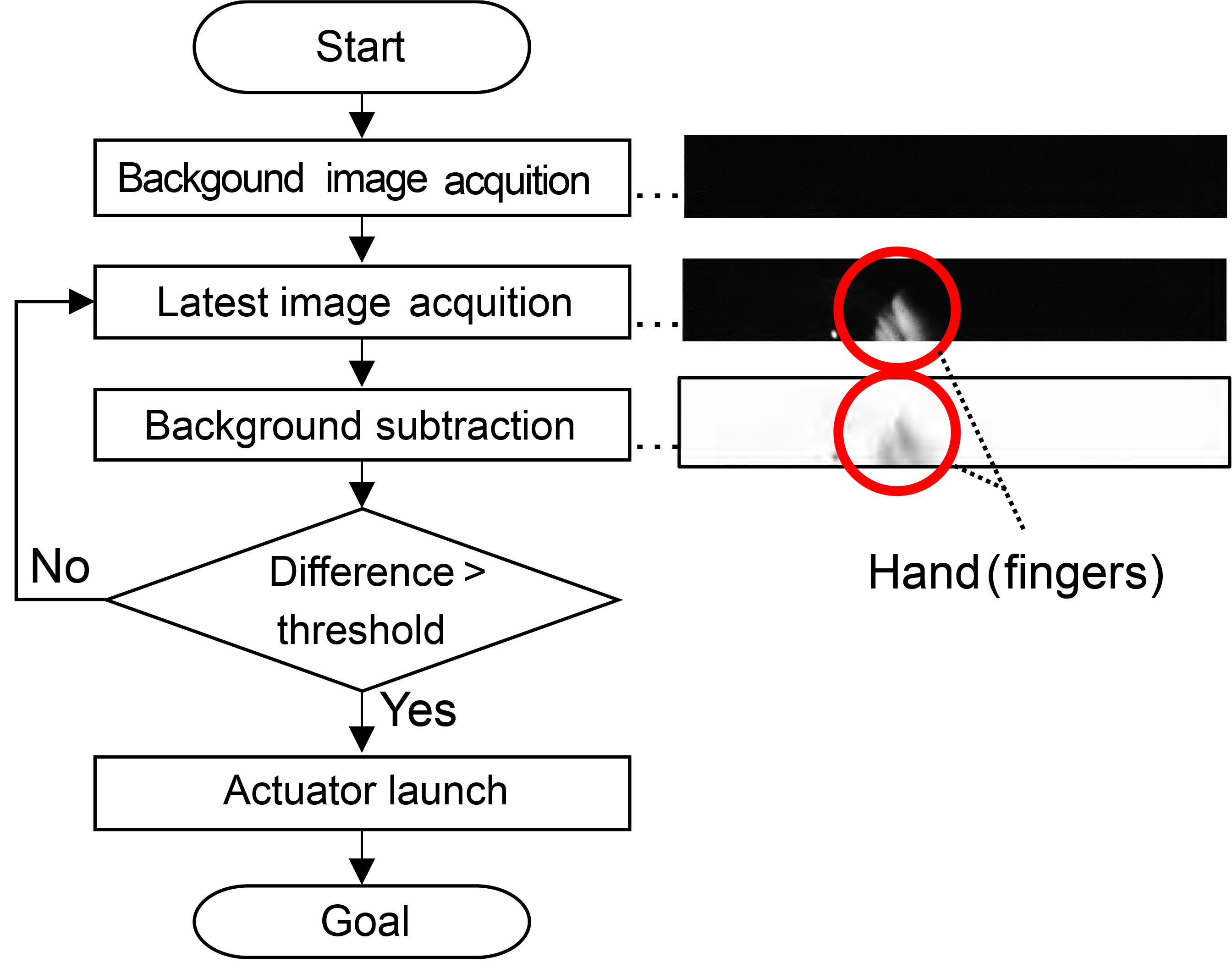
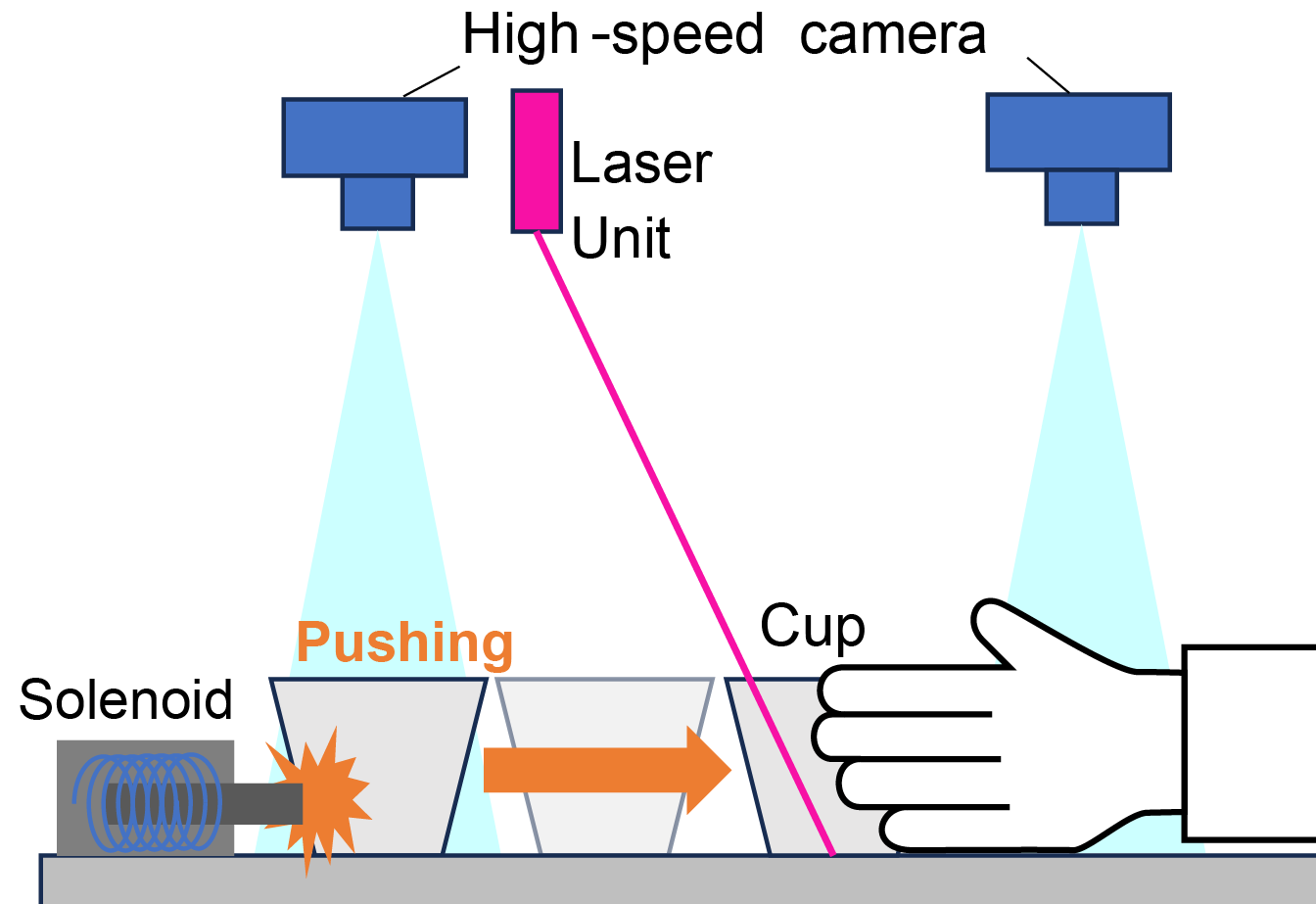
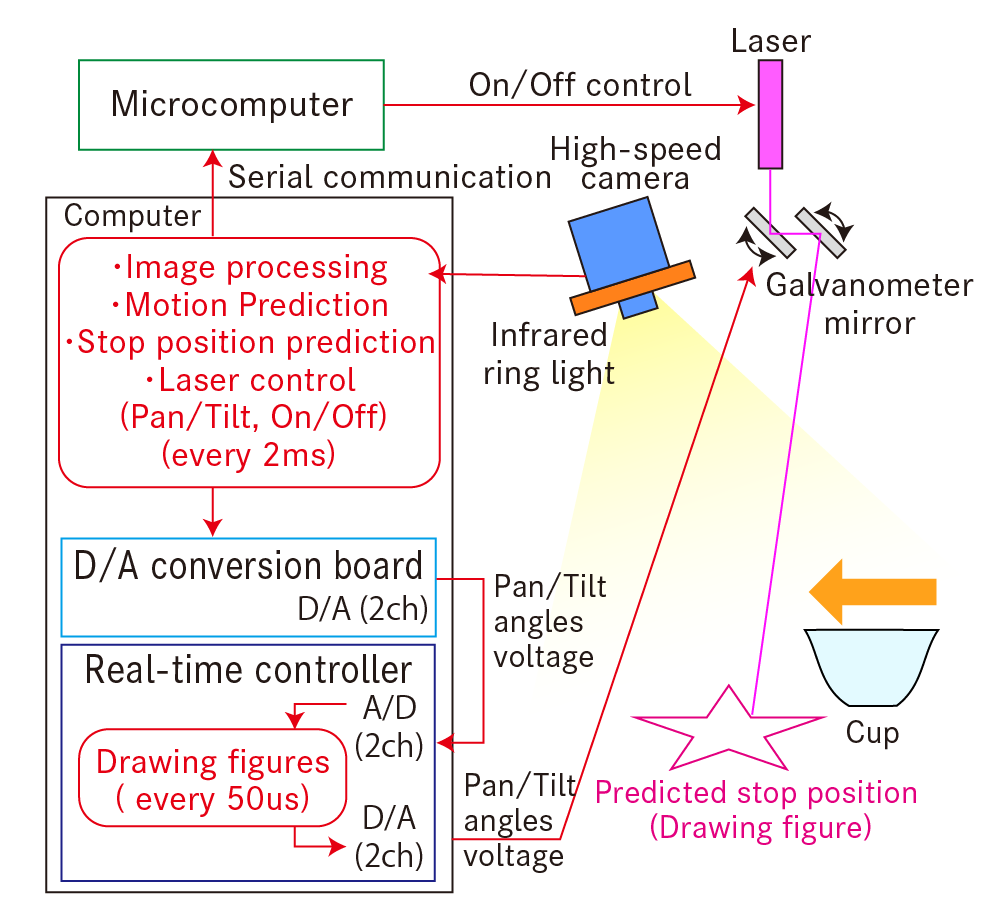
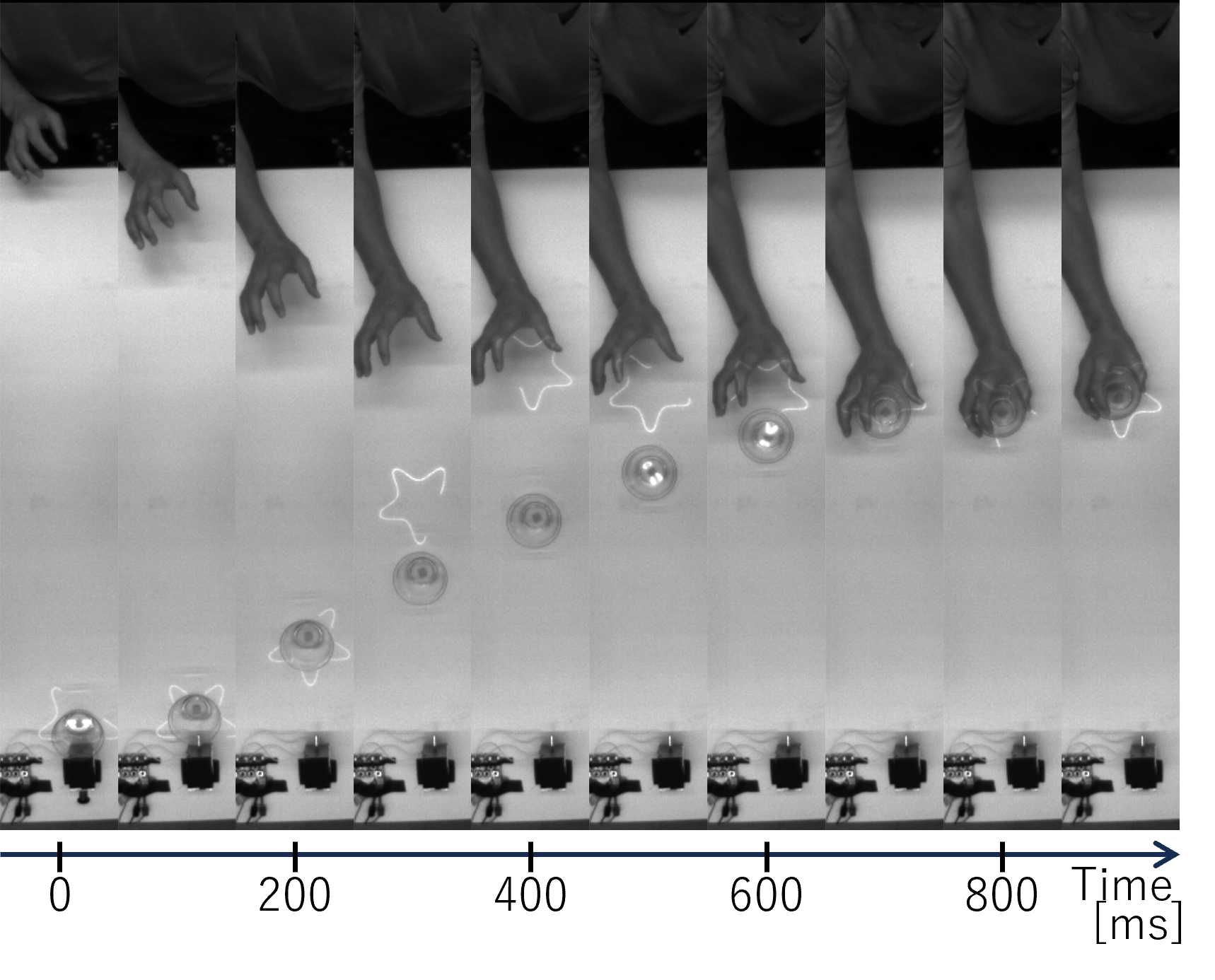
The system reads a person's intention to move hands on a desk and instantly activates an actuator such as a solenoid to support the person's movement. In addition, a high-speed display laser illuminates the predicted stopping position of the object pushed by the actuator to provide smooth motion support.
The effectiveness of the system was confirmed by experiments with test subjects, who were able to grasp objects more quickly with the system than without it.
 |
 |
hand motion detection until robot hand actuating |
|
 |
 |
Reference
- Tomohiko Hayakawa, Yuka Hiruma, Taku Senoo, Shouren Huang and Masatoshi Ishikawa, "Assist System to Speed up Object Grasping by Reading Human Intension on a Desk", The 25th Annual Conference of SICE SI(SI2024)(Iwate, Japan, Dec. 2024), Collection of papers,pp.2482-2483
- T. Hayakawa, S. Sueishi, Y. Hiruma, H. Tochioka, T. Senoo, S. Huang, M. Ishikawa, "Object Grasping Assist System with Reading Human Intention and Predicting Object Position", The 11th International Conference on Automation, Robotics and Applications (ICARA 2025), Zagreb, Croatia, 14 Feb (2025)
|
Ishikawa Group Laboratory Research Institute for Science & Technology, Tokyo University of Science Ishikawa Group Laboratory WWW admin: contact Copyright © 2008 Ishikawa Group Laboratory. All rights reserved. |
|