
 印刷用
印刷用動画 センサーフュージョン
- 高速多指ハンドを用いた動的保持動作

- 高速打撃動作におけるボール制御

- 高速多指ハンドを用いたダイナミックリグラスピング
- parallel-regrasping
- 普通のカメラ [3.35Mbyte]
- 高速カメラ [4.816Mbyte], [4.366Mbyte]
- vertical-regrasping
- 普通のカメラ [2.694Mbyte]
- 高速カメラ [4.837Mbyte]
- rotation-regrasping(180 [deg])
- 高速カメラ [4.837Mbyte]
- 連続リグラスピング
- 高速カメラ [4.689Mbyte]
- parallel-regrasping
- 多関節マニピュレータを用いた高速打撃動作

- 高速多指ハンドによるダイナミックキャッチング

-
高速視覚フィードバックを用いたダイナミックグラスピング

- キャッチング (AVI format 2.5Mbytes)
- ダイナミックグラスピング (MPEG format 3.0Mbytes)
- ダイナミックグラスピング (正面図) (MPEG format 3.0Mbytes)
-
列並列高速ビジョンシステム(CPV)を搭載した2自由度アクティブビジョン

- ターゲットトラッキング (CPV-I) (MPEG format 7byte)
-
ロボットハンドからの接触感覚を触覚神経経由により提示するシステムの開発
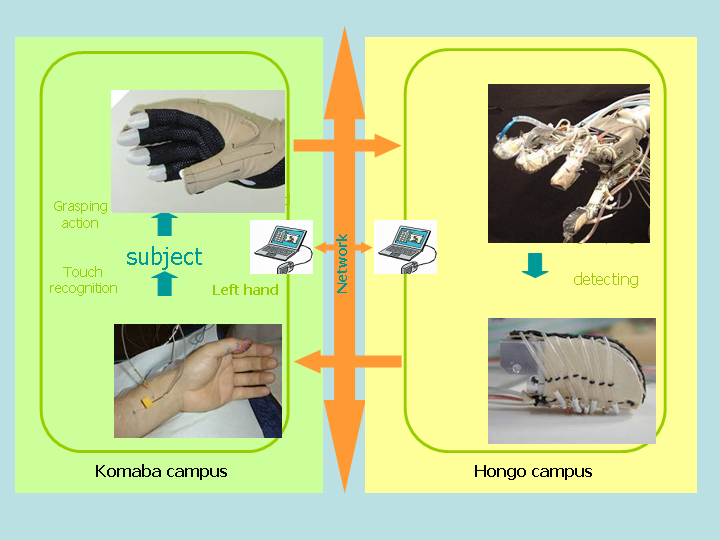
- 実験の様子 (MPEG format 7.3Mbyte)
-
高速センサフィードバックによる把握行動


- 実環境作業支援システム

- ペンを使った作業の支援 (MPEG 10Mbyte) (前半:視力覚フィードバックなしの場合,後半:視力覚フィードバックありの場合
- 視触覚モダリティ変換
-
1ms ビジュアルフィードバックシステム