


ホーム >
センサ フュージョン >
高速マニピュレーションシステム
高速マニピュレーションシステム
概要
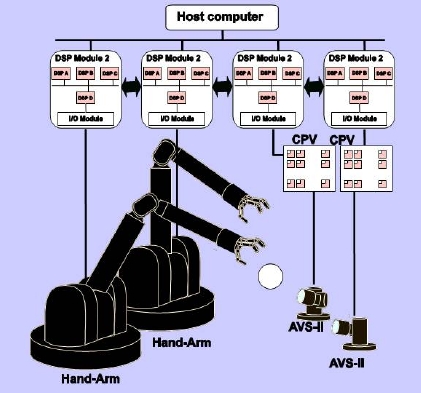
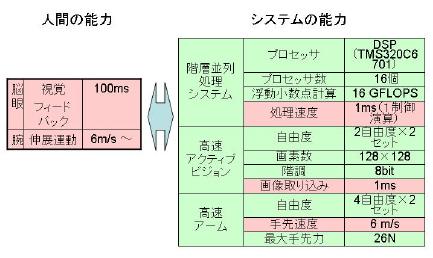
実環境において,投げる・捕るなどに代表されるような動的な操り動作を実現することを目的として, 視覚フィードバックに基づく高速マニピュレーションシステムを開発した. このシステムは,センサとして高速ビジョンチップシステムを搭載した双眼アクティブビジョン, アクチュエータとして双腕4軸高速マニピュレータと3指高速ハンド, 処理システムとしてDSPを用いた階層並列システムを備えている. システムの各構成要素の動特性を考慮して設計されているために, 無駄のない最適なパフォーマンスを引き出すことが可能である. 移動物体に対する把握実験を行うことで,構築したシステムの有効性を示した.
動画
参考文献
- Akio Namiki and Masatoshi Ishikawa : Robotic Catching Using a Direct Mapping from Visual Information to Motor Command, Proc. IEEE Int. Conf. on Robotics and Automation (Taipei, 2003.9.17)/Proceedings, pp.2400-2405 [ PDF format ]
- Akio Namiki and Masatoshi Ishikawa : Vision-Based Online Trajectory Generation and Its Application to Catching, Control Problems in Robotics (A.Bicchi, H.I.Christensen, and D. Prattichizzo Eds.), pp.249-264, Springer (2002) [ PDF format ]
- 並木明夫,中坊嘉宏,石川正俊:高速視覚を用いたダイナミックマニピュレーションシステム, 第19回日本ロボット学会学術講演会 (東京, 2001.9.19)/予稿集, pp.389-390