


ホーム >
ダイナミック ビジョン システム > 微生物電気走性の継続観察システム
微生物電気走性の継続観察システム
概要
微生物は進化の過程で高性能なセンサとアクチュエータを体内に獲得してきた. 我々は微生物を高機能マイクロマシンとみなして制御することを目指している
多くの微生物にはある種の外部刺激に対して定位しながら移動する性質があり, 「走性」と呼ばれている.OBM (Organized Bio-Modules) の実現においては微生物制御手法の確立が大きな課題であり, この走性の利用が制御手法として有用と考えられる.
微生物の走性には個体差があるため,より高度なアクチュエーションを実現するには, 微生物の走性を個体レベルで観察,評価する必要がある.しかし,従来の観察方法では, 高倍率で観察するとすぐに微生物を見失ってしまい,一個体の電気走性の継続観察が非常に困難であった. そのため,対象が視野から外れないように低倍率での観察を余儀なくされていた.
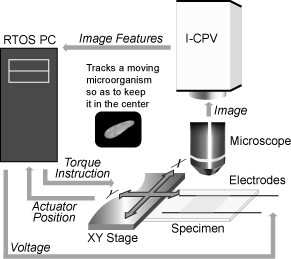
この問題を解決するため,高速視覚によるダイナミックイメージコントロールを応用して, 微生物一個体の電気走性を高倍率で継続的に観察可能なシステムを構築した.
システム構成
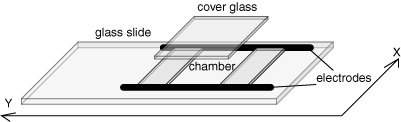
構成要素は,対象の画像情報を高速に取得する高速視覚システムと対象を視野中心に保持する XY ステージ, 電気刺激入力デバイス,制御用 PC,および顕微鏡である.
参考文献
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa : Single-Cell Level Continuous Observation of Microorganism Galvanotaxis using High-Speed Vision, 2004 IEEE International Symposium on Biomedical Imaging(ISBI 2004) (Arlington, 2004.4.18)/Proceedings, pp.1331-1334 (2004.4) [PDF (982K)] *IEEE
- 尾川順子,奥寛雅,橋本浩一,石川正俊:微生物の電気走性の継続観察システム, 第4回計測自動制御学会システムインテグレーション部門講演会(SI2003) (東京,2003.12.20)/講演会論文集,pp.385-386