


ホーム >
ダイナミック ビジョン システム > 走電性をもつ微生物運動制御のための電流制御型電気刺戟デバイス
走電性をもつ微生物運動制御のための電流制御型電気刺戟デバイス
概要
微生物は進化の過程で高性能なセンサとアクチュエータを体内に獲得してきた. 我々は微生物を高機能マイクロマシンとみなして制御することを目指している.
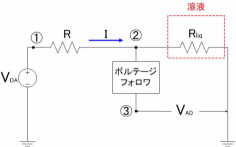
本研究では,負の走電性を利用して微生物の運動を制御する手法をより厳密に研究するために, より高い精度で溶液中の電位分布の制御が可能となる電流制御手法を提案した. 次に,提案手法に基づいて開発した電流制御型電気刺激デバイスを開発し, これを用いておこなった電位分布制御実験から,提案手法の有効性を示した.
参考文献
- 山根淳,尾川順子,奥寛雅,橋本浩一,石川正俊:ゾウリムシの運動制御のための電流制御型電気刺激デバイス, 日本機械学会ロボティクス・メカトロニクス講演会2004(ROBOMEC2004) (名古屋,2004.6.19)/講演論文集,1A1-H-28 [PDF (266K)]