


A Current-Based Electrostimulation Device for the Motion Control of Paramecium Cells
Summary
Microorganisms have smart built-in sensors and actuators in their bodies. Our goal is to control microorganisms as micro-scale smart robots for various applications.
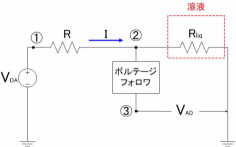
In this Paper, we propose a current controlled electrostimulation device to control and predict the shape of electric potential gradient in the liquid. We aim at controlling the motion of paramecia by using paramecia's galvanotaxis. By using this device, we can predict the shape of electric potential gradient in the liquid, and control paramecia more precisely.
Reference
- Jun Yamane, Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. A Current Controlled Electrostimulation Device for the Motion Control of Paramecia. 2004 JSME Conference on Robotics and Mechatronics (Robomec'04) (Nagoya, Japan, 19 Jun 2004) / Proceedings, 1A1-H-28, Jun. 2004. (in Japanese) [PDF (266K)]