


トラッキングBOS: 高速飛翔体の衝撃波画像計測
概要
本研究室では,駆動鏡面(ガルバノミラー)を用いた 高速な視線・光軸制御デバイス(サッカードミラー)を開発しており, 卓球などダイナミックに動き回る対象を継続的に画像中心に捉え続け撮影する 1msオートパン・チルト技術を確立している. 1msオートパン・チルト技術はダイナミックなスポーツ放映などへの応用が期待されるが, 本研究ではスポーツのボールよりも更に高速な, 通常数万fpsの高速カメラを用いて計測される高速飛翔体を計測対象とする.
本研究では,科学捜査への応用を目標とし, 高速飛翔体の飛翔中の振る舞いを詳細に理解することを目指している. 風洞を用いた固定対象への手法や数値シミュレーションとは異なり, 実際に飛翔する物体に対する光学的計測に着目し, 高速ビジョンを用いた1msオートパン・チルト技術を導入した新しい技術を確立した.
本技術は従来の固定カメラを利用した手法と比較して, 高速な運動体・飛翔体に対して 1)長時間, 2)高解像度, 3)長露光時間, 4)低モーションブラーの映像記録・画像計測を可能とするのが特徴である. 駆動鏡面を用いていることから本画像計測技術とともに, 同一光軸における他の光学的計測を同時に行える可能性も高く, 科学捜査の更なる発展への大きな寄与が期待される.
なお,本内容は 科学警察研究所 との共同研究の成果である.
ステップ1:高速飛翔体の映像計測
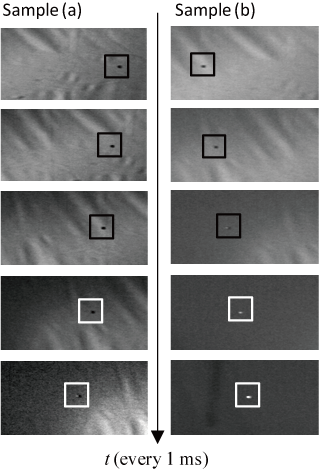
ステップ1では,まず250[m/s]程度の高速飛翔体を対象として, 継続的な映像計測システムを開発した.
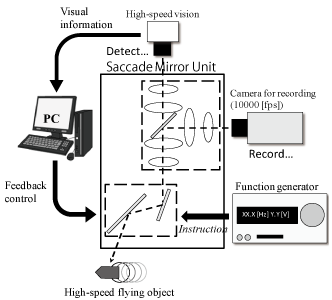
従来のスポーツのボールを対象とした1msオートパン・チルト技術では, 対象のトラッキング開始時には対象とカメラの光軸の動きが大きく異なっていても, ミラーの応答が十分高いためビジュアルフィードバックを用いたミラー制御により 対象を画角内に収め続けることができる. 一方で高速飛翔体では, ミラーの静止状態からトラッキングを開始してもすぐに対象が画角から外れてしまうため, 新しい光軸制御戦略として予測軌道指令を導入する必要がある.
本システムではファンクションジェネレータを用いた予測軌道指令に対し, 1msオートパン・チルト技術による高速ビジュアルフィードバックを加算変調することで, 実際に250[m/s]程度の高速飛翔体の継続的映像計測を実現した.
 |
 |
ステップ2:高速飛翔体の衝撃波画像計測
ステップ2では,更に高速な遷音速(約340[m/s]前後)の高速飛翔体を対象として, 継続的な衝撃波画像計測システムを開発した.
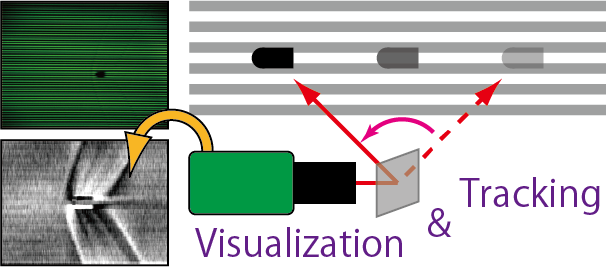
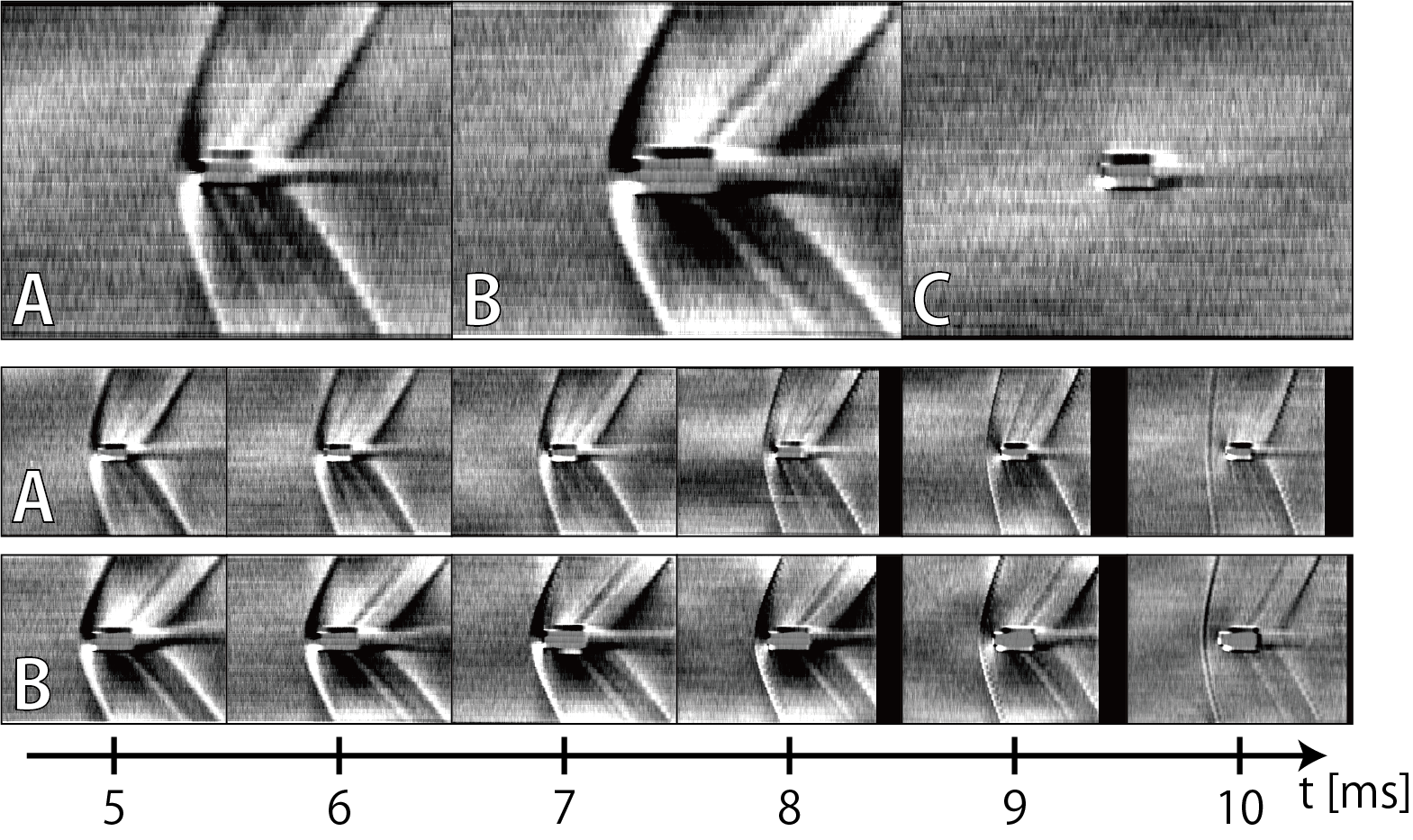
音速で飛翔する対象周囲には衝撃波が発生し, 特に音速とほぼ同じ速度では衝撃波発生位置振動など非定常な現象が生じることが知られている. トラッキングBackground-oriented Schlieren(BOS)法と呼ばれる本システムでは, 縞状の再帰性反射背景を導入することで, 陽炎と同様に光の屈折として高速飛翔体周囲の衝撃波を画像として捉えることができる.
ステップ2ではトラッキングBOS法 (応答を改良した予測軌道指令・高速ビジュアルフィードバックを駆使した高速トラッキングと, 背景の周期的な縞を含む撮影画像への衝撃波可視化画像処理)を利用して, 実際に高速飛翔体の衝撃波画像計測を達成した. そして長時間かつ高解像度な画像計測に基づき, 実飛翔体周囲において非定常現象である衝撃波の揺らぎの観測に成功した.
 |
 |
動画
トラッキングBOS法: 高速飛翔体の衝撃波画像計測
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Tomohiro Sueishi, Masato Ishii, and Masatoshi Ishikawa: Tracking Background-oriented Schlieren for Observing Shock Oscillations of Transonic Flying Objects, Applied Optics, Vol. 56, Issue 13, pp. 3789-3798 (2017)
- 奥村光平, 石井将人, 巽瑛理, 奥寛雅, 石川正俊: 高速視線制御光学系による高速飛翔体の映像計測, 計測自動制御学会論文集, Vol.49, No.9, pp.855-864 (2013)
- 奥村光平,奥寛雅,石川正俊: アクティブビジョンの高速化を担う光学的視線制御システム, 日本ロボット学会誌,Vol. 29,No. 2 (2011)