


サッカードミラー(駆動鏡面を用いた高速視線制御デバイス)
概要
通常ビジョンシステムの視野には限界があるが,主として監視用途やロボットビジョン用途ではその範囲を超えた広い領域の映像を取得したい場合が多く, レンズを含むビジョン(カメラ)自体を動かしてパン・チルトの視線方向を制御できる電動雲台がよく用いられている. 一方で近年ビジョンシステムのフレームレート・画像処理速度は共に高速化してきており, 一般にこのようなビジョンシステムを高速ビジョン(High-speed Image Processor) と呼ぶ. もしこの高速ビジョンの視線を,ミリ秒(1 ミリ秒 = 0.001 秒) オーダの撮像・画像処理時間に見合う速さで動的に制御すれば, 従来ならば速過ぎて差し迫った画角で撮影するのが困難であった運動対象を, 適当な画角でかつブレが無い状態で映像計測することが可能となる. このような映像は,メディアコンテンツ,医療,FA,ロボットビジョンなど様々な分野での応用が期待できる. ところが現実には,電動雲台を用いてビジョンの視線を制御するのに要する時間は, 撮像・画像処理に要する時間に比べはるかに長く,これがシステム全体の高速化のボトルネックとなっている. そこで我々は,ビジョン自体は固定したまま,光学的に視線方向のみを高速に制御可能なデバイス, サッカードミラー(Saccade Mirror) を提案する.
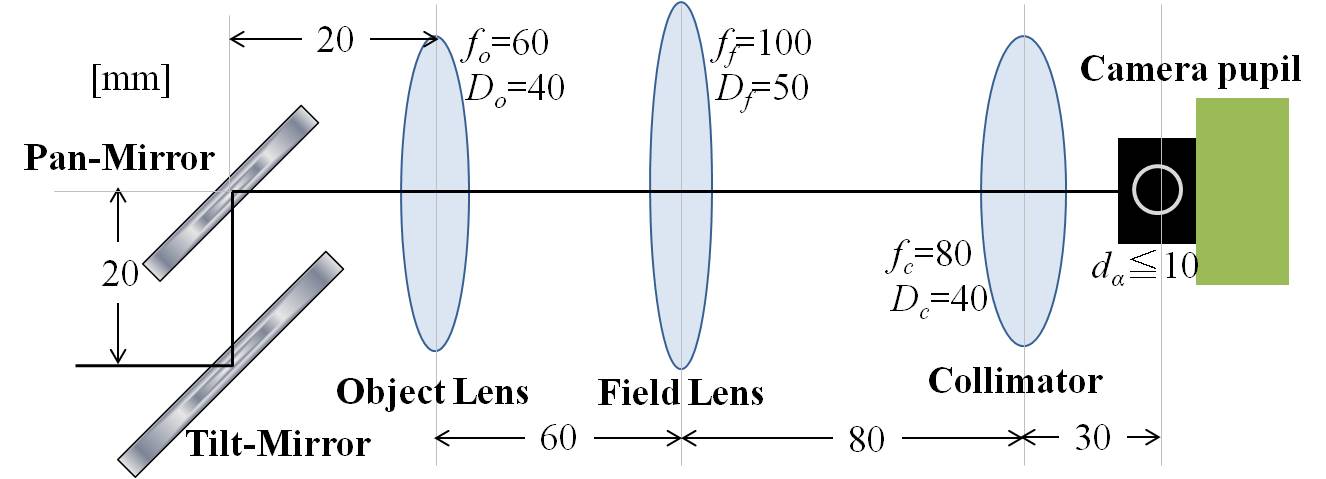
サッカードミラーは,2軸のガルバノミラーと瞳転送系と呼ばれるレンズ群から構成される. 前者は本来レーザを走査するためのデバイスであるため,鏡面のサイズは小さく高速な応答を実現する. しかし,単純にミラーだけを直列に配置した場合,光線束が鏡面上を通過する領域は大きく制限されるため実用的な画角を得ることが出来ない. かといってミラーサイズを大きくしてしまうと,せっかくの高速性を著しく損ねてしまう. そこで瞳転送系と呼ばれるレンズ群を,ミラーとマウントするカメラの間に配置し,カメラの瞳を両ミラーの前後に転送することで本問題を解決した.
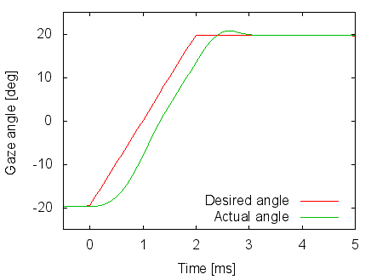
この度設計した試作品は,およそ30 degの画角まで対応できるものとなっている. 実際に試作品の応答時間を測定した結果, pan,tiltとも視線の最大走査時(40 deg)で3.5 ms以内という非常に小さい値であった.
 |
 |
動画
panだけでなくtilt走査についても同様の結果が得られた.
参考文献
- 奥村光平,奥寛雅,石川正俊: アクティブビジョンの高速化を担う光学的視線制御システム, 日本ロボット学会誌,Vol. 29,No. 2 (2011)
- 奥村光平,奥寛雅,石川正俊: 駆動する鏡面を用いた高速視線制御システム-サッカードミラー-, 第15回ロボティクスシンポジアプログラム(吉野山,2010.3.15)/予稿集,pp.214-219
- 奥村光平,奥寛雅,石川正俊 : 駆動鏡面式超高速アクティブビジョン, 第27回日本ロボット学会学術講演会(横浜,2009.9.17)/予稿集, 3R1-02