


高速飛翔体の映像計測
概要
撮像レートと視線制御レートがともにミリ秒オーダの超高速アクティブビジョンは,ロボットビジョン,メディア,FAなど様々な分野で有用性が期待される. しかし従来の電動雲台によるアクティブビジョンではミリ秒オーダという高速な視線制御が実現出来ない. そこで我々は電動雲台ではなく,光学的にカメラの視線だけを高速に制御出来るデバイス(サブシステム),『サッカードミラー』を開発した. サッカードミラーはパン・チルトそれぞれ60度の視線制御可能範囲を有し,そのステップ応答はわずか3.5 msである.
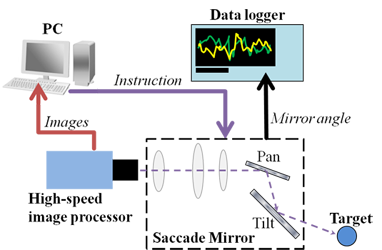
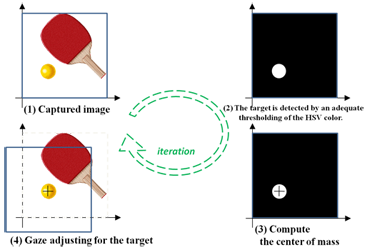
我々はこの高速性を生かして,スポーツ中継などに大きく貢献すると考えられる高速飛翔体の映像計測システムを構築した. 本システムは,サッカードミラー,高速ビジョン,計算機からなるビジュアルフィードバック系である(図1). 映像計測したい対象の画像内の重心位置を逐次計算し,その位置と画像の中心が一致するように視線を制御する. これを繰り返すことで,常に画像中に計測対象がおおよそ画像中心にあるような映像を得ることが出来る(図2).
ただし,実際にはサッカードミラーの応答時間の限界や計算機による遅延などもあり,とくに計測対象が高速である場合は, 完全に画像中心と対象物体を一致させることは困難である(トラッキングエラー). そこで取得された映像の各フレームに対して再度重心を計算し,その重心が完全に画像中心になるよう画像自体をスライドさせることでトラッキングエラーを補正している. 本補正技術は,微生物の擬似静止観察に用いた2nd-pass Image Processingを並進方向に対してのみ適用したものである.
 |
 |
動画
ソフトテニスボールをラケットで打つという運動を本システムを用いて映像計測した. 従来の低速なシステムでは,ボールがラケットに打ちつけられ速度ベクトルが反転するとトラッキング出来なくなるという現象が多くあったが, 本システムでは確実にボールの運動をとらえている.また2nd-pass Image Processingを用いることでトラッキングエラーも補正された安定な観察が可能となる.
参考文献
- Kohei Okumura, Hiromasa Oku and Masatoshi Ishikawa: High-Speed Gaze Controller for Millisecond-order Pan/tilt Camera, 2011 IEEE International Conference on Robotics and Automation (ICRA 2011) (Shanghai, 2011.5.12) / Conference Proceedings, pp.6186-6191 [PDF (1.3MB)]*IEEE
- 奥村光平,奥寛雅,石川正俊: 駆動鏡面を用いた超高速アクティブビジョン, 第16回画像センシングシンポジウム (SSII2010) (横浜,2010.6.10-11)/講演論文集,DS2-04