


Stationary Observation System for High-speed Flying Objects
Summary
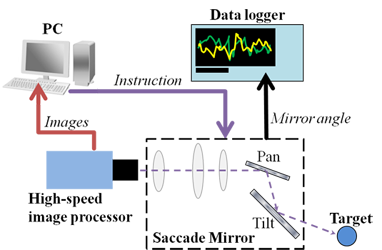
We have developed "Saccade Mirror" and successfully achieved a millisecond-order high-speed pan/tilt camera. As an application of this high-speed pan/tilt camera, we propose a stationary observation system for high-speed flying objects. This system is a kind of visual feedback system which is composed of the Saccade Mirror, a high-speed image processor and a computer (Fig.1).
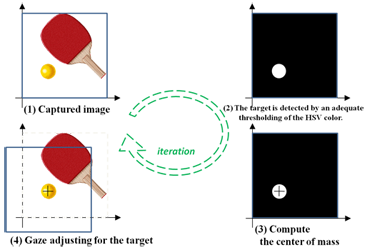
A developed tracking algorithm is presented (Fig.2). It computes the center of mass of a dynamic target for every frames, and controls the mirrors' angle to let the center of mass correspond with the center of image. Then, it can track the target by these iteration.
These images, however, still have a little translational tracking error due to the mirrors' response and the computer's delay. So for our stationary observation, the computer finally let obtained each image slide even to compensate the tracking error using 2nd-pass Image Processing (for only translational components).
 |
 |
Movie
Reference
- Kohei Okumura, Hiromasa Oku and Masatoshi Ishikawa: High-Speed Gaze Controller for Millisecond-order Pan/tilt Camera, 2011 IEEE International Conference on Robotics and Automation (ICRA 2011) (Shanghai, 2011.5.12) / Conference Proceedings, pp.6186-6191 [PDF (1.3MB)]*IEEE