ホーム >
センサ フュージョン >
Super tactile-based active touchによる薄板部品の高速・低反力挿入
Super tactile-based active touchによる薄板部品の高速・低反力挿入
概要
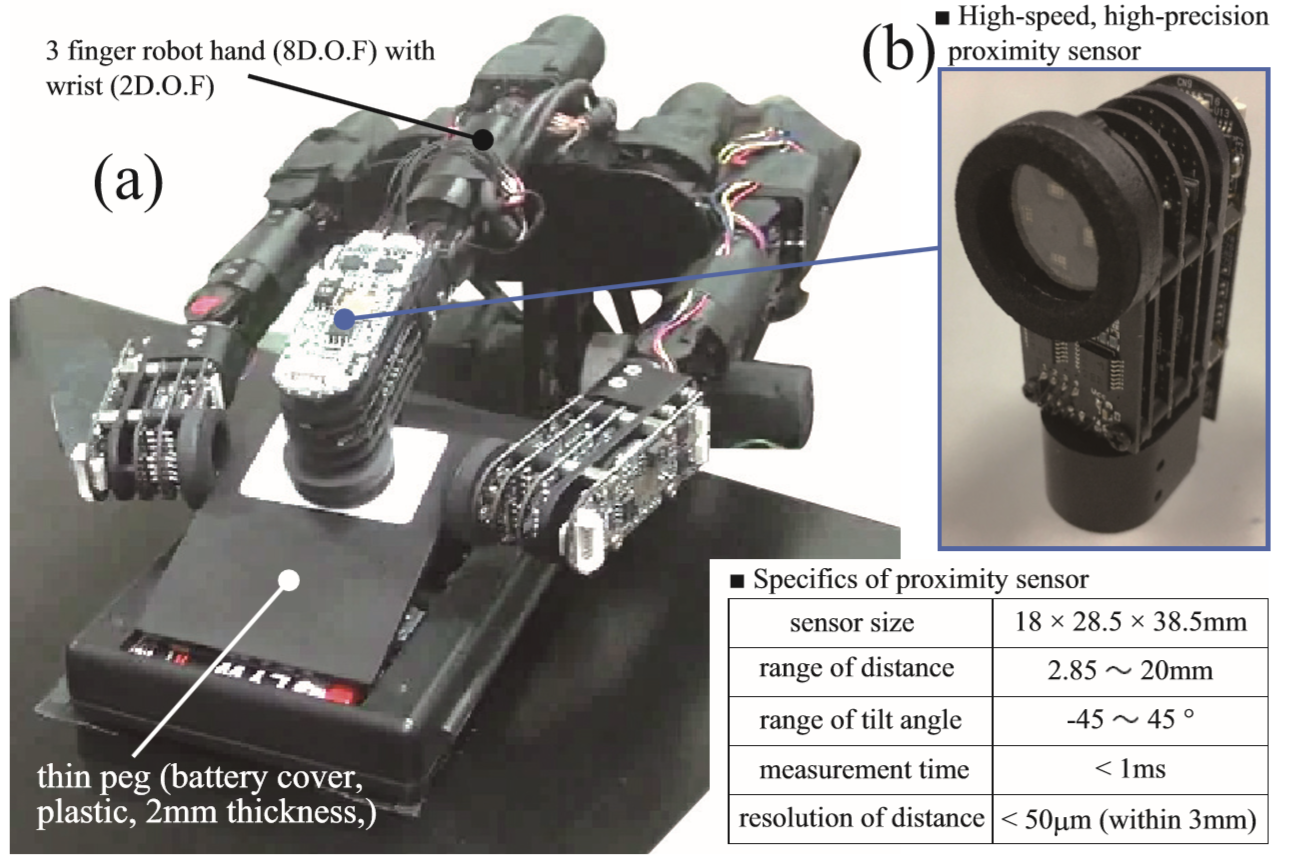
高速・高精度近接覚センサによる高感度な接触検知を利用した新たな組立戦略を提案しました.
高速軽量ハンドの2指で把持した薄板部品の姿勢を残り1指の近接覚センサで計測することで挿入位置を調整する戦略です.
薄板部品の姿勢変化を基準に部品同士の接触と挿入位置を検出するため,極めて小さい接触力でかつ高速に組立作業ができます.
近接覚センサによる高感度な接触検知(超触覚,Super tactile)となぞり動作(アクティブタッチ,active touch)を組み合わせた戦略であるため,
"Super tactile-based active touch"と呼んでいます.
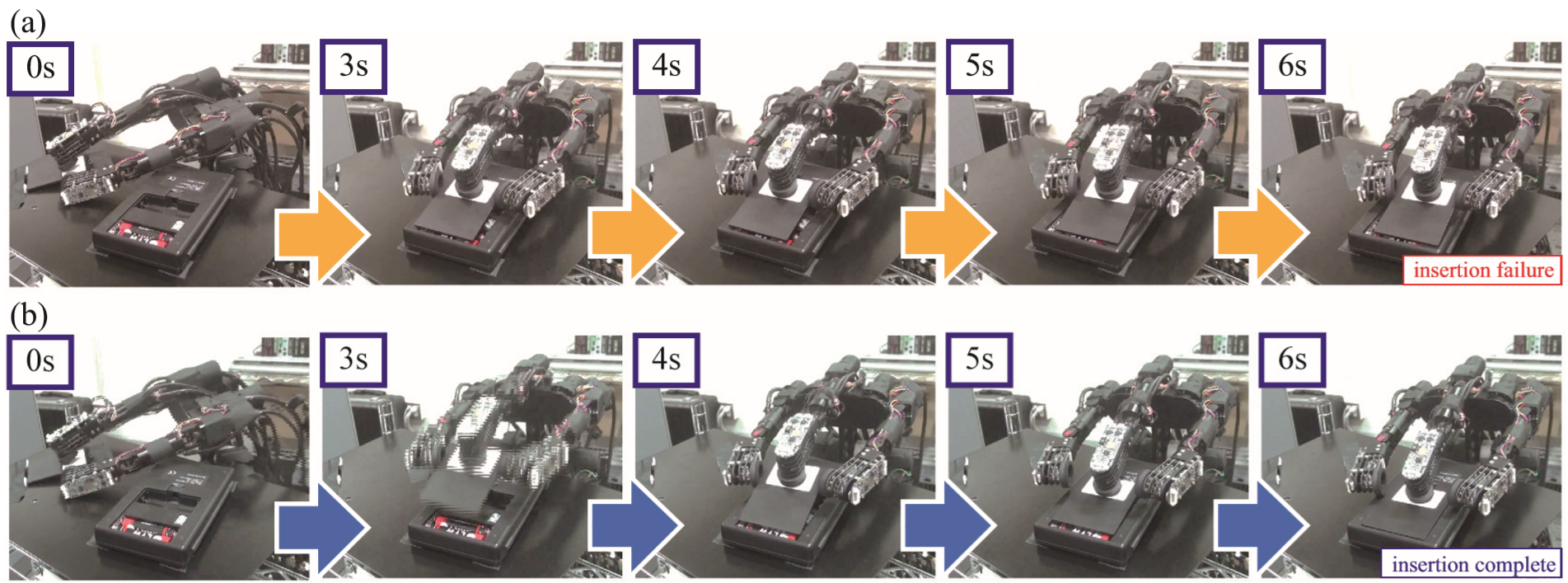
以下の写真は(a)ティーチング軌道のみで挿入を行った場合と,
(b)ティーチング軌道とSuper tactile-baesd active touchを使用した場合の挿入結果です.
(a)ティーチング軌道のみの場合,ティーチングの位置誤差により挿入を失敗しますが,
(b)Super tactile-baesd active touchを用いることで位置誤差を修正し挿入を達成可能です.
薄板部品のペグインホールはほとんど研究されておらず,センサフィードバックベースでの高速挿入戦略の提案は我々が知る限り初です.
参考文献
- 小山佳祐,下条誠,妹尾拓,石川正俊:触覚機能を内包する高速・高精度近接覚センサ-第三報:Super tactile-based active touchによる薄板部品の高速・低反力挿入-,
日本機械学会ロボティクスメカトロニクス講演会2019(Robomech2019) (広島,2018.6.7) / 講演会論文集,2P1-H01.
[論文PDF],
[ポスターPDF]