Home >
Sensor Fusion >
High-speed, low-contact force insertion using super tactile-based active touch
High-speed, low-contact force insertion using super tactile-based active touch
Summary
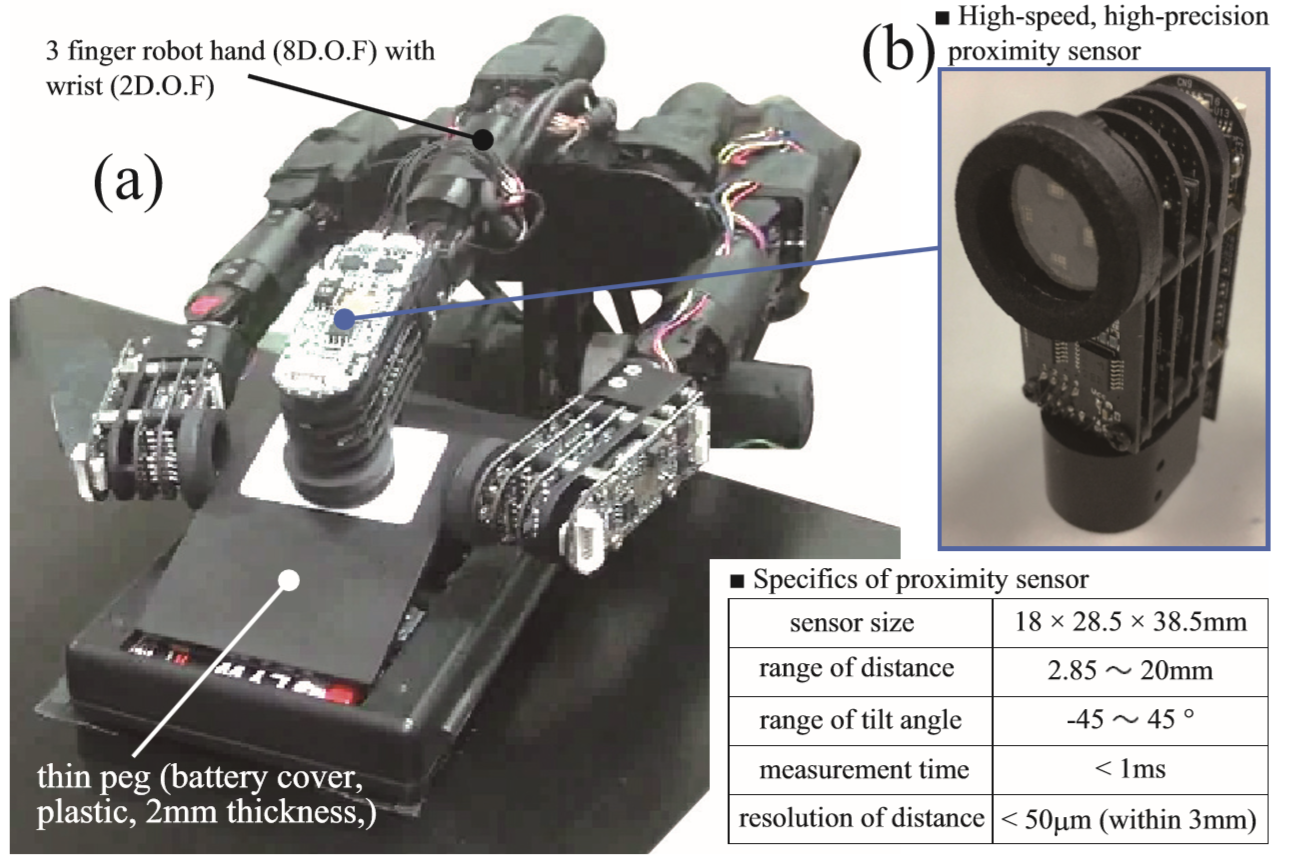
We propose a new assembly strategy that uses high-sensitivity contact detection with our high-speed, high-precision proximity sensor.
The insertion position is adjusted by measuring the posture of thin plate part grasped by two fingers of the high-speed lightweight hand.
Since the contact between the parts and the insertion position are detected based on the change in the posture of the thin plate parts,
the robot hand can insert the parts at a high speed with an extremely small contact force.
This is a strategy that combines high-sensitivity contact detection (super tactile) with the proximity sensor and tracing motion (active touch).
We therefore call it "Super tactile-based active touch".
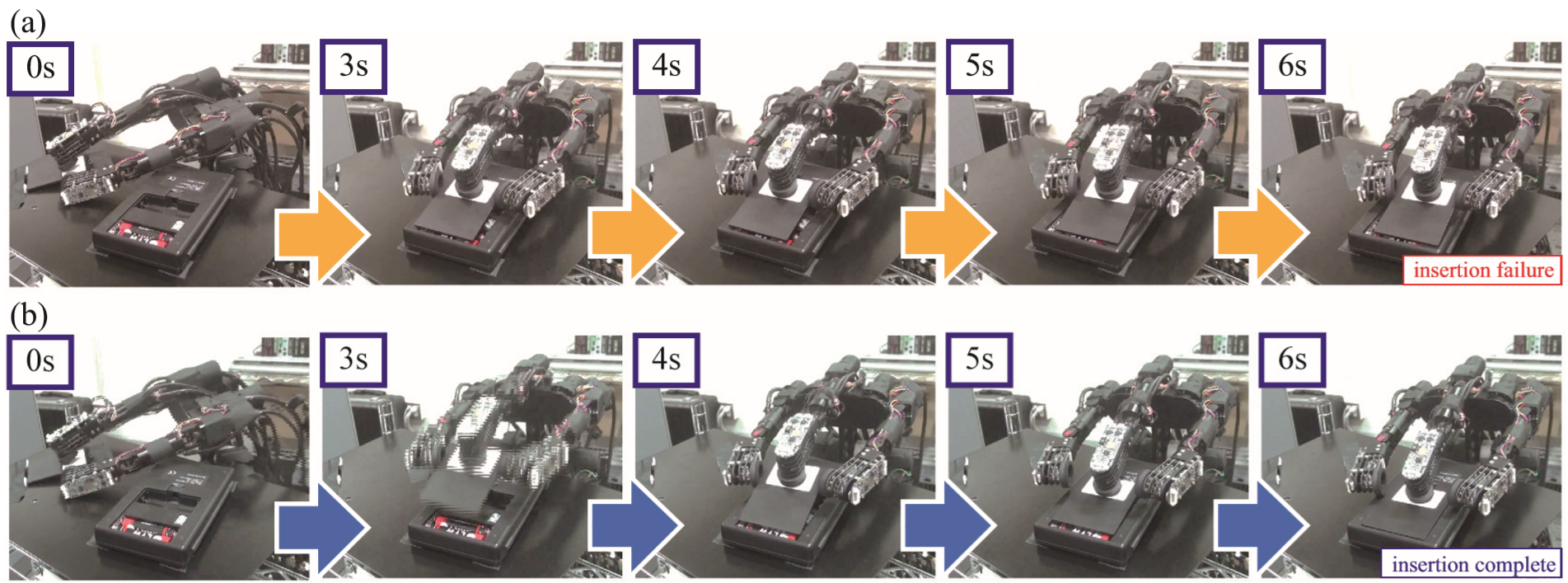
The following pictures are (a) when the insertion is performed only on a teaching trajectory,
(b) insertion result when the teaching trajectory and super tactile-baesd active touch are used.
In case of (a) only teaching trajectory, insertion task was failed due to position error.
On the other hand, in case of (b), position error could be corrected and insertion could be achieved.
The proposal of a high-speed insertion strategy based on the sensor feedback is the first known to us.
Reference
- Keisuke Koyama, Makoto Shimojo, Taku Senoo, Masatoshi Ishikawa:
High-Speed High-Precision Proximity Sensor Subsuming Tactile Function
-High-speed, Low-contact Force Thin Peg Insertion with Super Tactile-based Active Touch-,
The Robotics and Mechatronics Conference 2019 in Hiroshima (ROBOMECH2019) / proceedings, 2P1-H01 (in Japanese).