Home >
Sensor Fusion >
High-Speed Catching of a Paper Balloon using High-performance Proximity Sensor
High-Speed Catching of a Paper Balloon using High-Performance Proximity Sensor
Summary
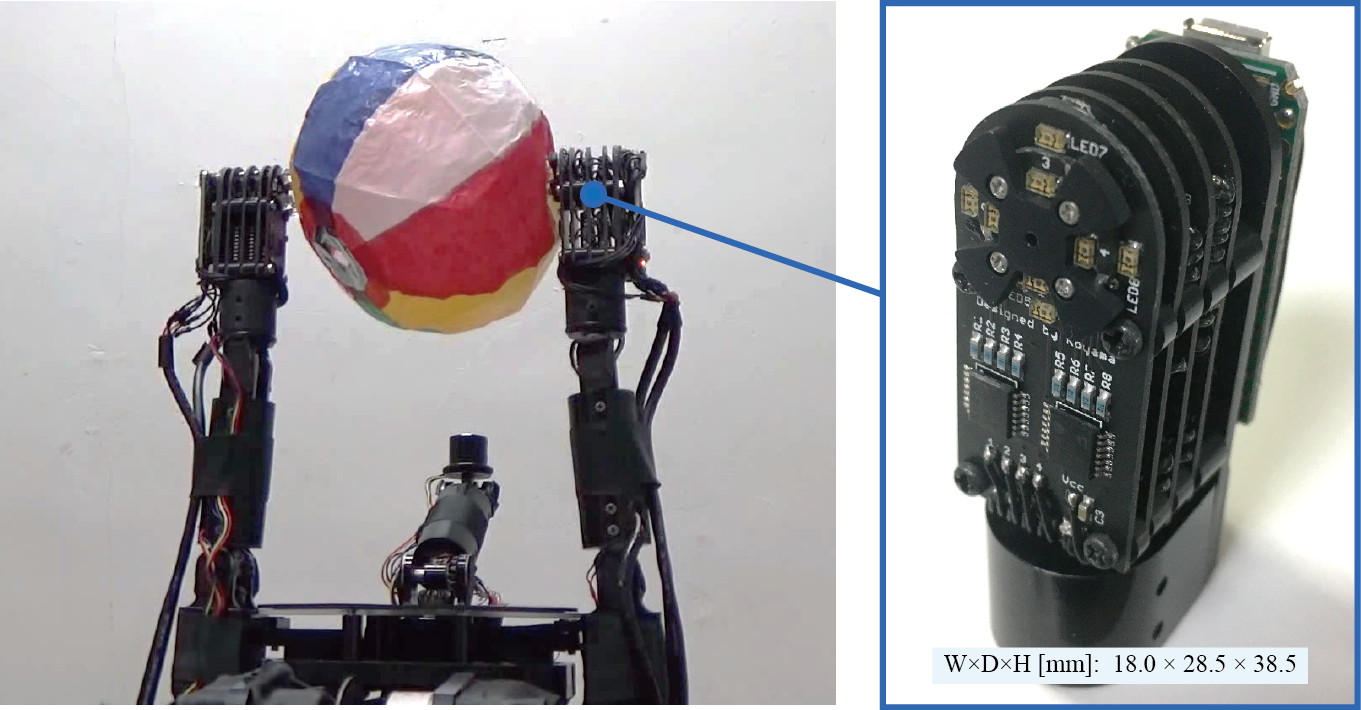
For high-speed and super soft-touch catching, we developed a fingertip-size, high-performance proximity sensor.
The sensor detects tilt angles of and the distance to an object surface independent of the reflectance.
The measurement time is within 1 ms an the peak-to-peak distance error in a short distance is less than 31 micro meters.
Although the detection principle is a method proposed in the past (Masuda et. al, 1981) , we designed an analog circuit suitable for
the principle and optimized the optical design of the detection element.
We achieved small-size, high-speed and high-accuracy proximity sensor.
High-speed, high-accuracy measurement enables "super tactile sensing" which continuously detects the object from non-contact to contact state,
allowing the robot hand to grasp a fragile object at high speed and with a soft touch.
The hand was able to catch the paper balloon with a deformation equal to or less than that achievable by a human performing the same catching task.
The hand autonomously adjusts the grasping position according to the object position,
posture, shape and softness. This technology can be applied to various robot fields
such as industrial robots and home service robots.
Now, we are developing 1ms sensor fusion system with the high-speed vision sensor and the proximity sensor.
We will realize more challenging, high-speed and precise catching.
Fig.1. The high-speed robot hand equipped with the high-performance proximity sensor
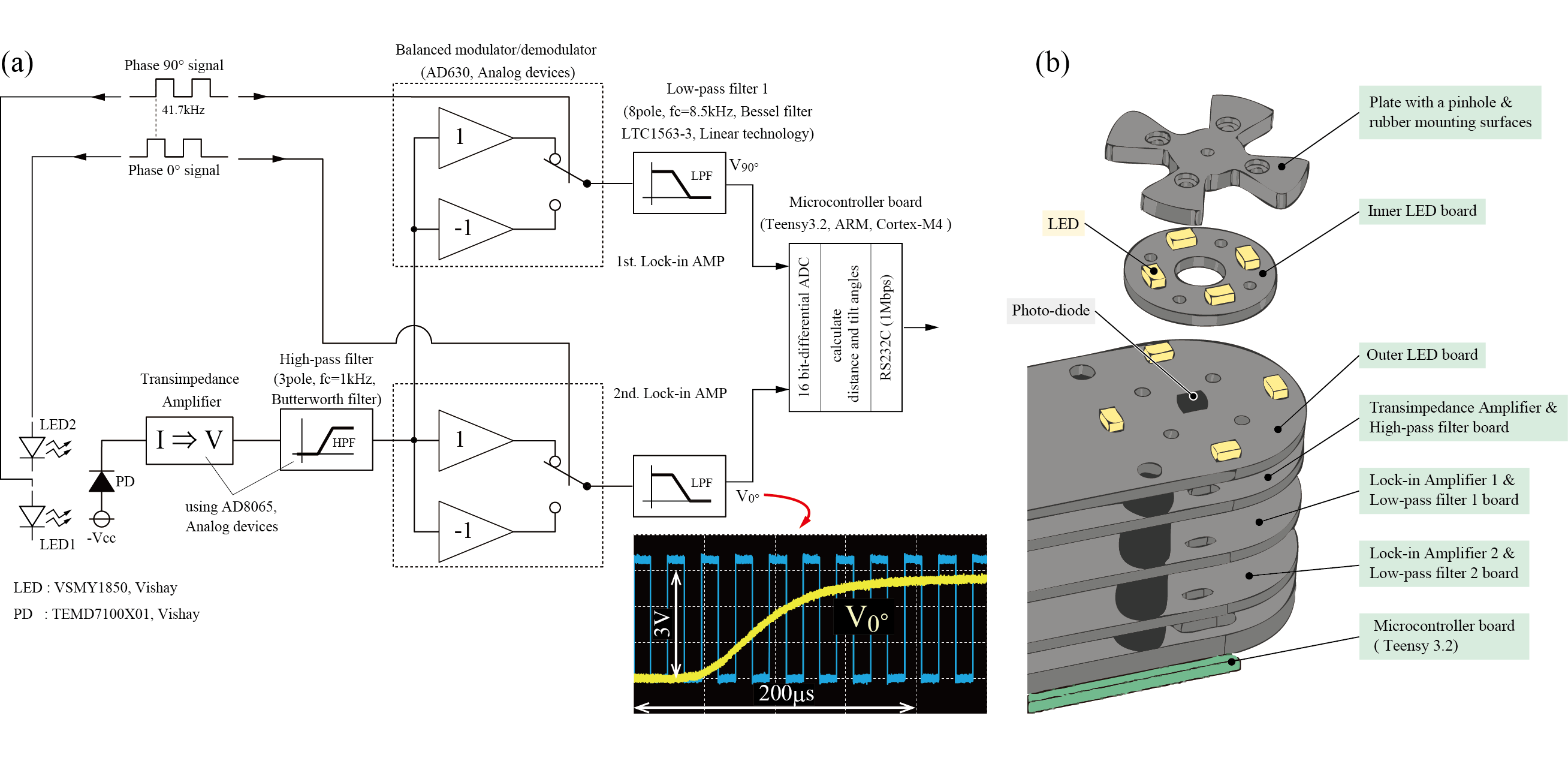
Fig.2. (a) Block diagram of the circuit. (b)Schematic diagram of the arrangement of the circuit board.
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
Keisuke Koyama, Makoto Shimojo, Taku Senoo, and Masatoshi Ishikawa: High-Speed High-Precision Proximity Sensor for Detection of Tilt, Distance, and Contact, IEEE Robotics and Automation Letters, Vol.3, No.4, pp.3224-3231 (2018)
Keisuke Koyama, Makoto Shimojo, Taku Senoo, Masatoshi Ishikawa: High-Speed High-Precision Proximity Sensor Subsuming Tactile Function -Sensor Module and Contact Detection Method-,
2018 JSME Conference on Robotics and Mechatronics, 1P1-H03 (2018) (Japanese).