


ホーム >
センサ フュージョン > 環境設置型高速ビジョンによる高速移動体の障害物回避
環境設置型高速ビジョンによる高速移動体の障害物回避
概要
世界最先端IT国家創造宣言(平成25年6月14日)の中で,「世界で最も安全で環境にやさしく経済的な道路交通社会の実現」が掲げられた.本目標に対して,交通渋滞の緩和や安全運転支援などの個々のアプリケーションについての提案が主に行われてきたが,今後は来るべき社会の構造を想定した上でこれらの具体策を考えることが重要である.このためには,まずITS共通のフレームワークであるITSインフラの整備から進めるべきである.
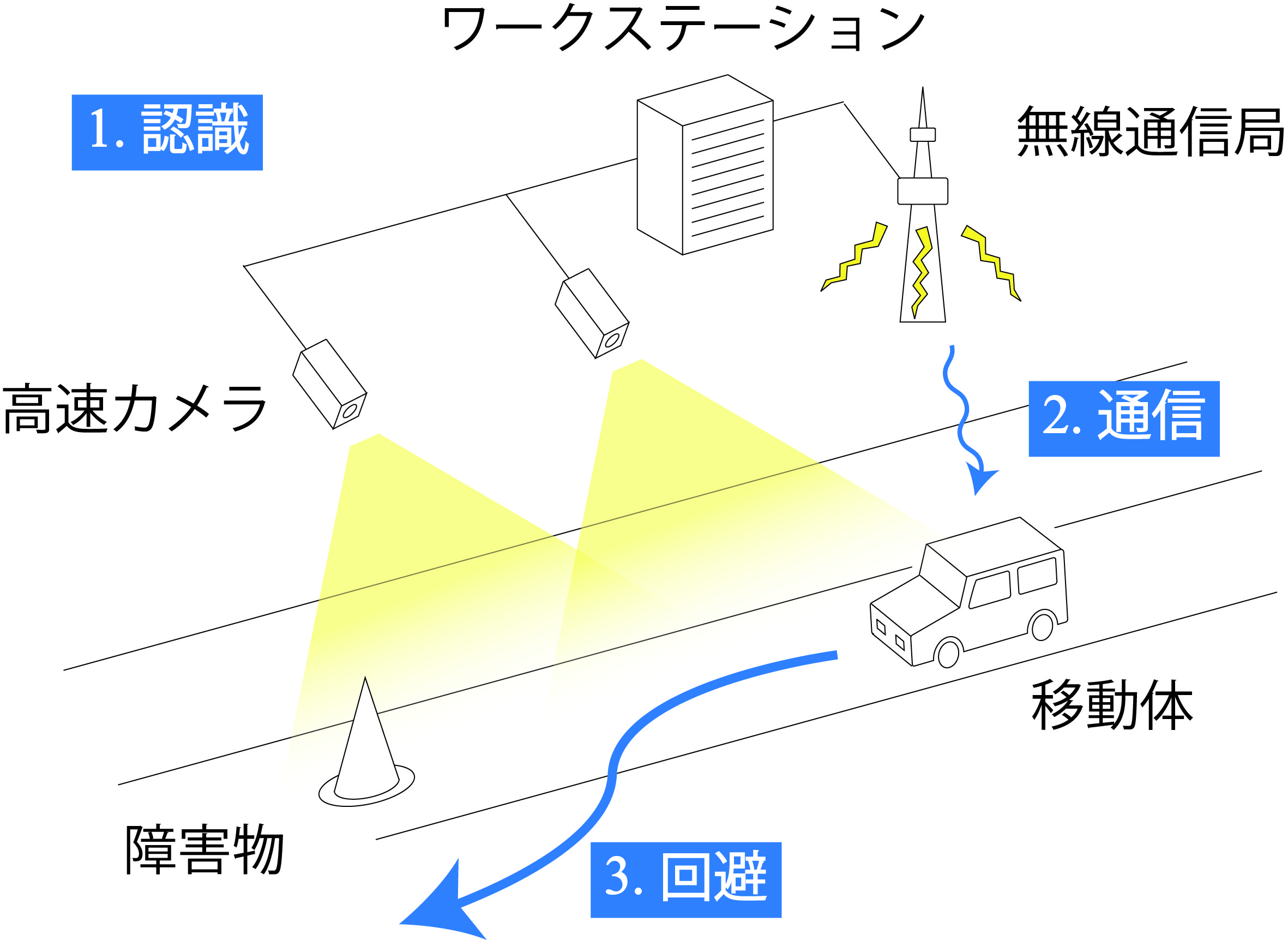
我々が提案しているネットワーク化高速ビジョンシステム1 は,路面を高速ビジョンで隙間なく把握することにより,従来のシステムを凌駕する機能を達成することができる.本研究では,特に,路面上の移動体と障害物を高速で把握することにより,安全運転支援に役立てることができることを示したものである.
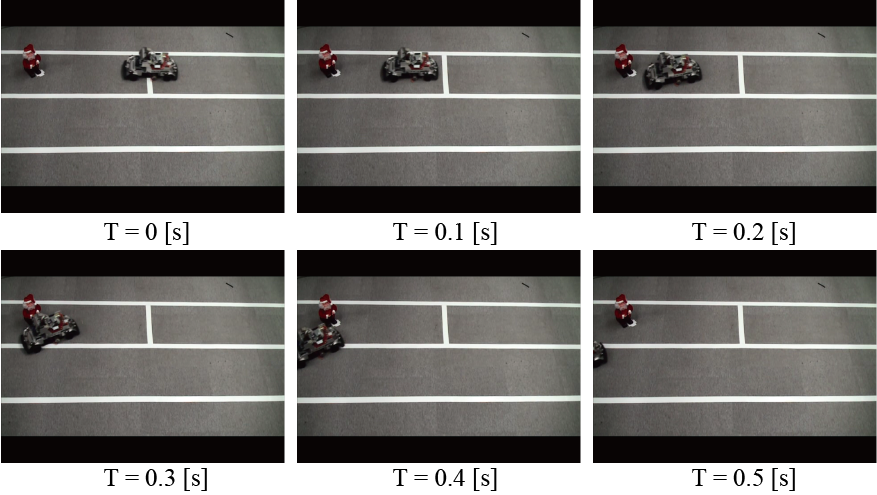
具体例として,1/10スケールの実験環境において,時速約10km(実環境では,時速100kmに相当)で高速に運動している移動体を,ネットワーク化高速ビジョンシステムで認識すると同時に,移動体の障害物回避を実現している.本技術を応用することにより,高速道路上や見通しの悪い交差点などにおいて突然飛び出してきた人や物を瞬時に判断するとともに,その情報を元に移動体を制御することで安全運転・交通事故防止を可能にし,さらなるITS技術の発展に寄与すると考えられる.
参考文献
- 平野正浩, 野田聡人, 山川雄司, 石川正俊: 環境設置型高速ビジョンによるインテリジェントカーの衝突回避, 第14回 計測自動制御学会 システムインテグレーション部門講演会 (神戸, 2013.12.18)/講演会論文集, pp. 940-941 (2013)
- 野田聡人, 平野正浩, 山川雄司, 石川正俊: ネットワーク化高速ビジョンシステムによる移動体の周辺環境認識, 第14回 計測自動制御学会 システムインテグレーション部門講演会 (神戸, 2013.12.19)/講演会論文集, pp. 1046-1048 (2013)
- Akihito Noda, Masahiro Hirano, Yuji Yamakawa, Masatoshi Ishikawa: A Networked High-Speed Vision System for Vehicle Tracking, 2014 IEEE Sensors Applications Symposium(SAS2014) (Queenstown, Newzealand, 2014.2.20)/Proceedings, pp.343-348 (2014)
- 平野正浩, 野田聡人, 山川雄司, 石川正俊: 環境設置型高速ビジョンを用いた高速移動体の衝突回避支援システム, ロボティクス・メカトロニクス講演会2014 (富山, 2014.5.27)/講演会論文集, 2A2-G06 (2014)
- Masahiro Hirano, Akihito Noda, Yuji Yamakawa and Masatoshi Ishikawa: Collision avoidance of Intelligent Vehicle based on Networked High-speed Vision System, 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO2014), (Vienna, Austria, 2014.9.1)/Proceedings, Vol.2, pp.539-544 (2014)
- Masahiro Hirano, Akihito Noda, Masatoshi Ishikawa, Yuji Yamakawa: Networked High-speed Vision for Evasive Maneuver Assist, ICT Express, Volume 3, Issue 4, pp.178-182 (2017)