


ホーム >
センサ フュージョン > 1自由度脚ロボットの跳躍パターン解析
1自由度脚ロボットの跳躍パターン解析
概要
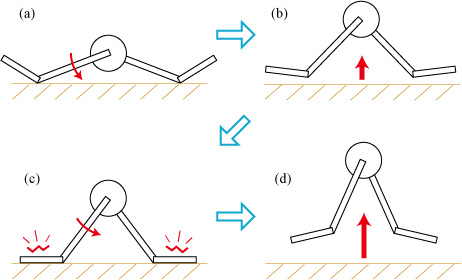
ダイナミックな脚運動の実現に向けて, 2脚を有する1自由度ロボットの跳躍動作について解析した. 跳躍パターンの分類に着目し, そのダイナミクスと基本的な特徴を導出した. 特に, 跳躍直後に地面を蹴って上昇速度を増加する二段ジャンプについて検討をおこなった. また, ロボットの構造パラメータ変化に対する跳躍高さについてシミュレーションをおこない, 各跳躍パターンが有効となる領域について考察した. 高速アクチュエータを用いた実験により, パターン分類に基づく跳躍動作を実現し, 解析の妥当性を検証した.
動画
参考文献
- Taku Senoo, Yuichi Tanno and Masatoshi Ishikawa. Jumping Patterns Analysis for 1-DOF Two-legged Robot. 11th International Conference on Control, Automation, Robotics and Vision. (Singapore, 2010.12.8) / Proceedings, pp.603-608.
- 妹尾拓, 丹野優一, 石川正俊: 1自由度脚ロボットの跳躍パターン解析, 日本機械学会ロボティクスメカトロニクス部門講演会2010 (旭川, 2010.6.16) / 講演論文集, 2A1-F30.