


Home >
Sensor Fusion >
Jumping Patterns Analysis for 1-DOF Two-legged Robot
Jumping Patterns Analysis for 1-DOF Two-legged Robot
Research
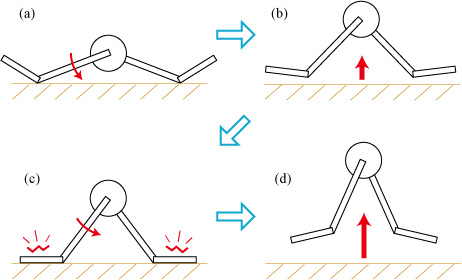
In this research a jumping motion is considered with the goal of achieving high-speed dynamic motion for legged robots. The dynamics of the 1-DOF legged robot and basic characteristics of its mechanism are derived to obtain jumping strategies. In particular two-step jumping method is newly proposed, which utilizes impact on the ground just after first takeoff to increase the velocity. This pattern is effective for robots composed of lightweight and fast actuators. In addition the effect of structural parameters of the legged robot on jumping height is analyzed. It proves how to determine the optimum design or jumping pattern under a given set of conditions. Experimental results are also shown in which a 1-DOF two-legged robot jumps.
Movies
Reference
- Taku Senoo, Yuichi Tanno and Masatoshi Ishikawa. Jumping Patterns Analysis for 1-DOF Two-legged Robot. 11th International Conference on Control, Automation, Robotics and Vision. (Singapore, 2010.12.8) / Proceedings, pp.603-608.