


ホーム >
センサ フュージョン > 高速運動中の微小物体把持
高速運動中の微小物体把持
概要
これまでに本研究室ではロボットの器用な道具の操りを目指し, 道具の受動関節性を提案した. また,ここで扱う高速ロボットシステムでは、高速なアクチュエータや高速画像処理技術を用いることによって, 精確性はもちろんのこと,人間よりも速い動作と外界の認識を行うことができ,人間では行えないタスク, 道具の操りを実現できる可能性を秘めている.そこで本研究では,高速運動する物体の扱いを通して, ロボットの高速性を活かした道具の器用な操り技能の獲得を目的とする.
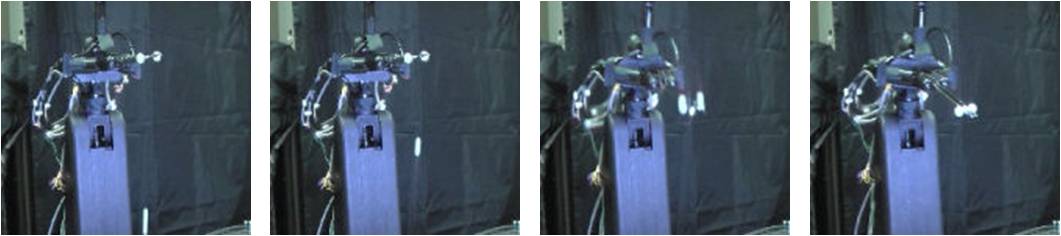
人間を超える動作例として,空中を放物運動中の直径6mmのプラスチック球(米粒ほどの大きさ)をピンセットでキャッチする実験を行った. ここで用いるピンセットの鉛直方向の幅は3mmであり,キャッチ時にはピンセットの中心部とプラスチック球の位置誤差は±1.5mmしか許されず, 高精度な操りが要求されるタスクである.
動画
参考文献
- Taku Senoo, Daiki Yoneyama, Akio Namiki and Masatoshi Ishikawa. Tweezers Manipulation Using High-speed Visual Servoing Based on Contact Analysis. 2011 IEEE International Conference on Robotics and Biomimetics. (Phuket, Thailand, 2011.12.9) / Proceedings, pp.1936-1941.
- Taku Senoo, Daiki Yoneyama, Akio Namiki and Masatoshi Ishikawa. Tweezers-type Tool Manipulation by a High-speed Robot System. IEEE International Conference on Biomedical Robotics and Biomechatronics. (Tokyo, Japan, 2010.9.26) / Workshop.
- 米山大揮, 水澤悟, 妹尾拓, 並木明夫, 石川正俊: 高速視覚サーボによるピンセット型道具操り, 第16回 ロボティクスシンポジア (指宿,2011.3.15) / 講演論文集, pp.512-517.
- 米山大揮,妹尾拓, 並木明夫, 石川正俊: 高速多指ハンドによるピンセットを用いた微小物体把持, 第10回計測自動制御学会システムインテグレーション部門講演会, pp. 1365-1366 (2009)