


Home >
Sensor Fusion >
Catching a small object in high-speed motion
Catching a small object in high-speed motion
Summary
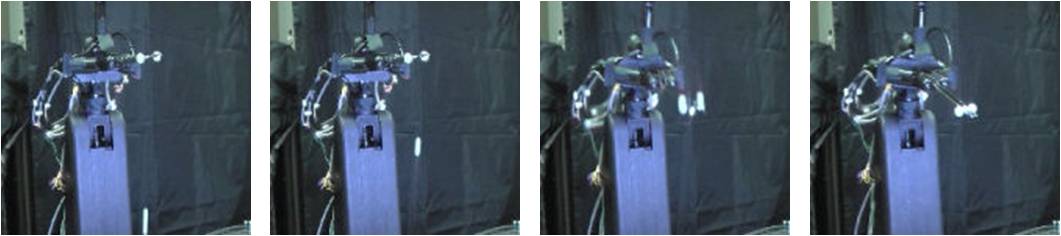
So far, we proposed the passive joint between hand and tools in order to achieve more skillful tool-handling. The high-speed robot system we developed has the potential of achieving the task and tool-handling which human cannot do, because it can behave faster and get information from the external world faster than human by high-speed actuator and high-speed vision system. In this research, we aim for finding out new skill in tool-handling which uses high-speed performance maximally.
For instance of task overcoming human, we achieved catching 6mm plastic ball in parabolic motion using tweezers. In this task, the margin for error between the center of tweezers and ball is plus or minus 1.5mm. So precise handling is needed.
Movies
References
- Taku Senoo, Daiki Yoneyama, Akio Namiki and Masatoshi Ishikawa. Tweezers Manipulation Using High-speed Visual Servoing Based on Contact Analysis. 2011 IEEE International Conference on Robotics and Biomimetics. (Phuket, Thailand, 2011.12.9) / Proceedings, pp.1936-1941.
- Taku Senoo, Daiki Yoneyama, Akio Namiki and Masatoshi Ishikawa. Tweezers-type Tool Manipulation by a High-speed Robot System. IEEE International Conference on Biomedical Robotics and Biomechatronics. (Tokyo, Japan, 2010.9.26) / Workshop.
- D. Yoneyama, S. Mizusawa, T. Senoo, A. Namiki and M. Ishikawa: Tweezers type tool manipulation using a high-speed visual servoing, 16th Robotics Symposia, pp. 512-517 (2011)
- Daiki Yoneyama, Taku Senoo, Akio Namiki and Masatoshi Ishikawa: Grasping a small object using tweezers by a high-speed multifingered hand, Proceedings of the 10th SICE System Integration Division Annual Conference (SI2009), pp.1365-1366. (2009)