


ホーム >
センサ フュージョン
>
吊り下げられた面状柔軟物体に対する展開および整列動作の連続操作
吊り下げられた面状柔軟物体に対する展開および整列動作の連続操作
概要
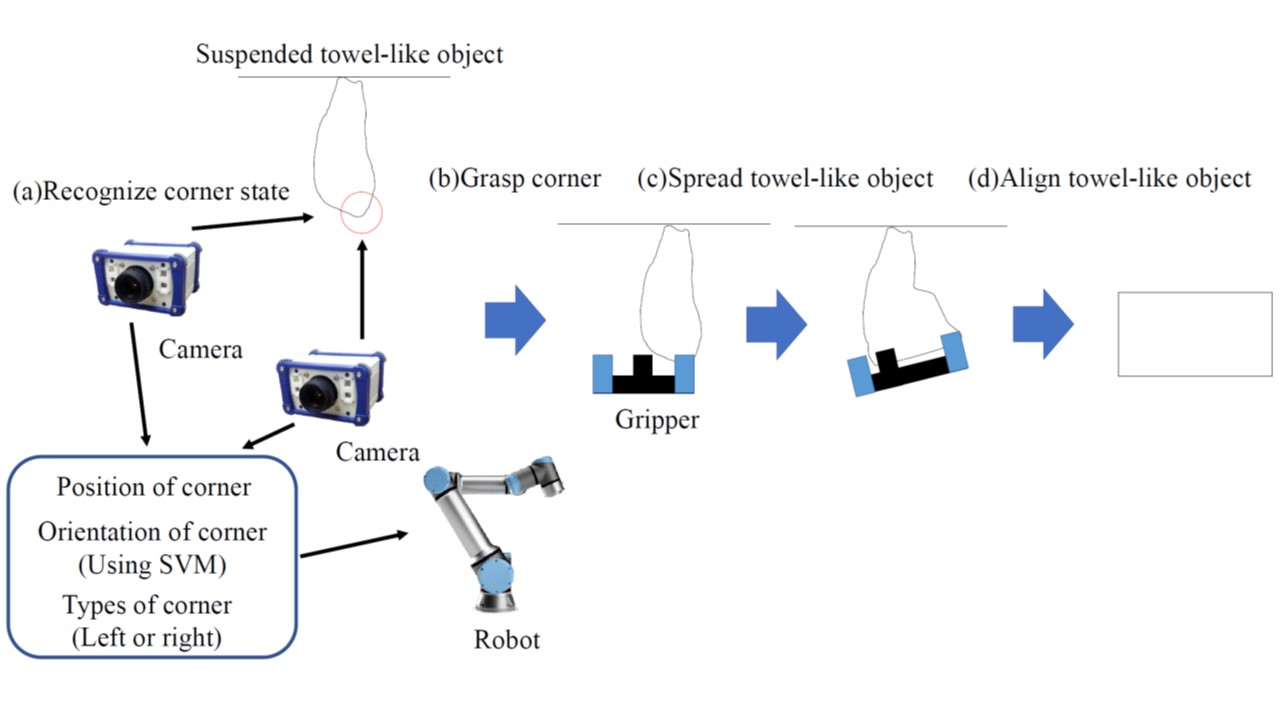
近年,リネンサプライ業界等で,タオルの様な面状柔軟物体操作の自動化が期待されている.操作の一例として,バラ積みにされたタオルを取り出し,後工程のために決められた位置に展開して設置する操作が挙げられるが,タオルの操作中に変形が起きたり,操作中の変形状態を推定することが難しいため,従来のロボットシステムでは実現が困難である. これに対して,我々は人とロボットの協調動作(静的マニピュレーション)と高速なロボット動作(動的マニピュレーション)を組み合わせることにより,タオルの整列操作を実現してきた. 本研究では,さらなる自動化を目指し,タオルの展開動作をロボットで高速に行い,整列操作までを連続して実現する方法を提案した. タオルの展開動作に関しては,2台のToFカメラの情報を用いて吊り下がっているタオルの最下点をコーナーとして抽出し,そのコーナーの状態を機械学習ベースの方法で認識し,その認識結果に基づいてロボットの把持動作を実現した. その後,新規に開発したエンドエフェクタ(両端に固定したグリッパとその間を移動するグリッパ)により展開動作を実現したのち,整列動作までをロボットアームを用いて実現している.
参考文献
- 岡衛,村上健一,黄守仁,角博文,石川正俊,山川雄司: 面状柔軟物の展開に向けたコーナーの状態認識と把持動作計画, 第39回 日本ロボット学会学術講演会 (RSJ2021) (オンライン開催, 2021.9.11)/講演論文集, 3F1-01 (2021).
- Mamoru Oka, Kenichi Murakami, Shouren Huang, Hirofumi Sumi, Masatoshi Ishikawa and Yuji Yamakawa: High-speed Manipulation of Continuous Spreading and Aligning a Suspended Towel-like Object, 2022 IEEE/SICE International Symposium on System Integration (Online, 2022.1.10) (2022).