


Continuous Manipulation of spreading and aligning operations for a suspended flexible object
Summary
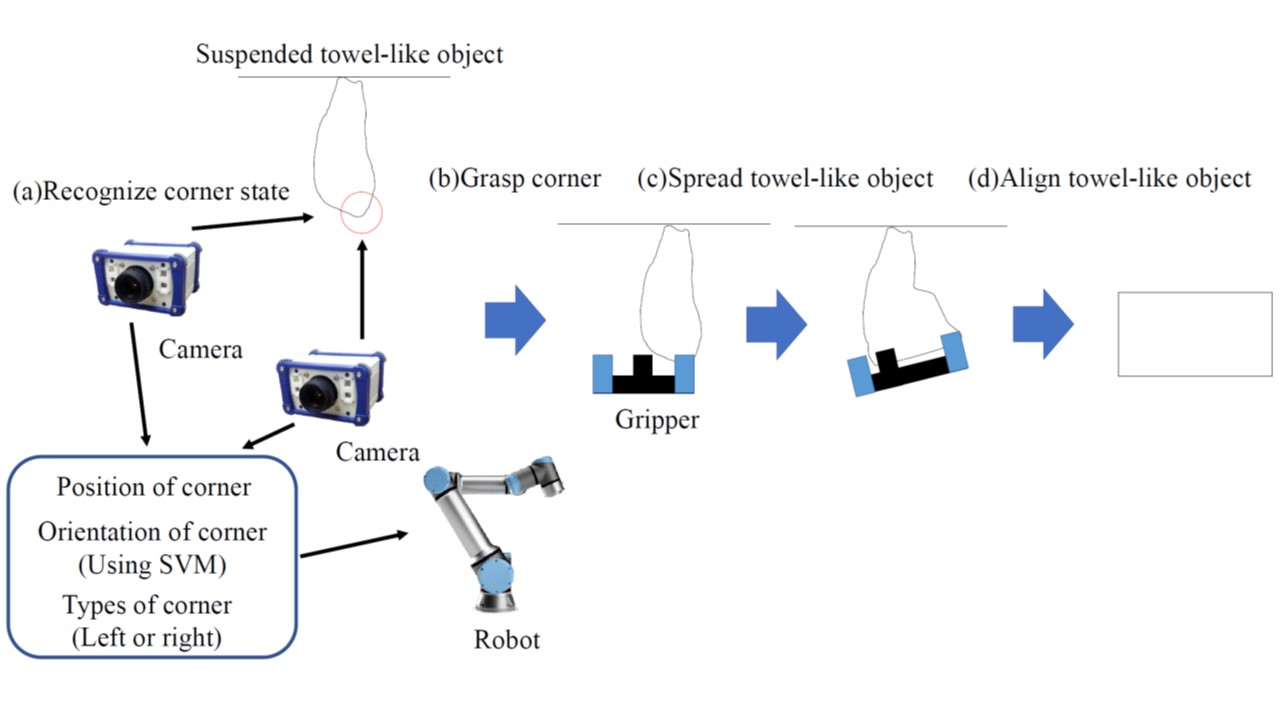
In recent years, there has been an increasing demand for robotic handling of towel-like objects in linen and laun- dry services. One such task involves picking up a towel randomly and aligning it to a predetermined position and posture. However, it is difficult for robots to handle these towel-like flexible objects because deformation occurs during robotic manipulation, and manipulation based on estimation of deformation status is rather challenging and unfeasible for most robotic systems. To solve this problem, we achieved this task using a method that combines human–robot cooperation for static manipulation (grasping) and high-speed robotic motion strategy for dynamic manipulation (aligning) in our previous work. In this reserach, we propose a method to realize the towel spreading operation by a robot at high-speed and the towel alignment operation continuously, aiming at further automation. For the towel spreading operation, we extracted the lowest point of the suspended towel as a corner using information from two ToF cameras, and recognized the state of the corner using a machine learning-based method, then we realized the grasping motion of the robot based on the recognition result. After that, a newly developed end-effector (a gripper fixed at both ends and a gripper that moves between them) is used to realize the spreading motion, and the robot arm is used to realize the alignment motion.
Reference
- Mamoru Oka, Kenichi Murakami, Shouren Huang, Hirofumi Sumi, Masatoshi Ishikawa and Yuji Yamakawa: High-speed Manipulation of Continuous Spreading and Aligning a Suspended Towel-like Object, 2022 IEEE/SICE International Symposium on System Integration (Online, 2022.1.10) (2022).