


高速ビジョンと高速多指ロボットハンドを用いたテレマニピュレーションシステム
概要
近年,異なる場所に存在するロボットハンドを人間が操縦するマスタスレーブ型ロボットハンドシステムに関する研究が進んでいる. 特に,マスタ側の人間の手の位置情報センシングを非接触で行い,人間の手の動作に対応するようにスレーブ側のロボットハンドを動作させるシステムは,操作性の観点から有用性は高いと考える. このようなシステムに対して,頻繁に状況が変化するような動的なスレーブ環境下で適切な動作を実現するためには,人間の高速な動作の計測とその再現,高応答速度,そして高速な触覚情報の取得が必要である.
そこで本論文では,高速ロボットハンドシステムを用いたマスタ・スレーブ型システムを提案する. このシステムは人間の手の高速な動作を高時間分解能でスレーブ側で再現可能で,かつ入力から出力までの応答速度が極めて高く,人間の視覚認識速度を凌ぐ. また,ロボットハンド側で操作する物体の硬軟情報を高速に取得できる. 構築したマスタスレーブ型ロボットハンドシステムを用いたいくつかの具体例を基に,提案システムの有効性を確かめた.
|
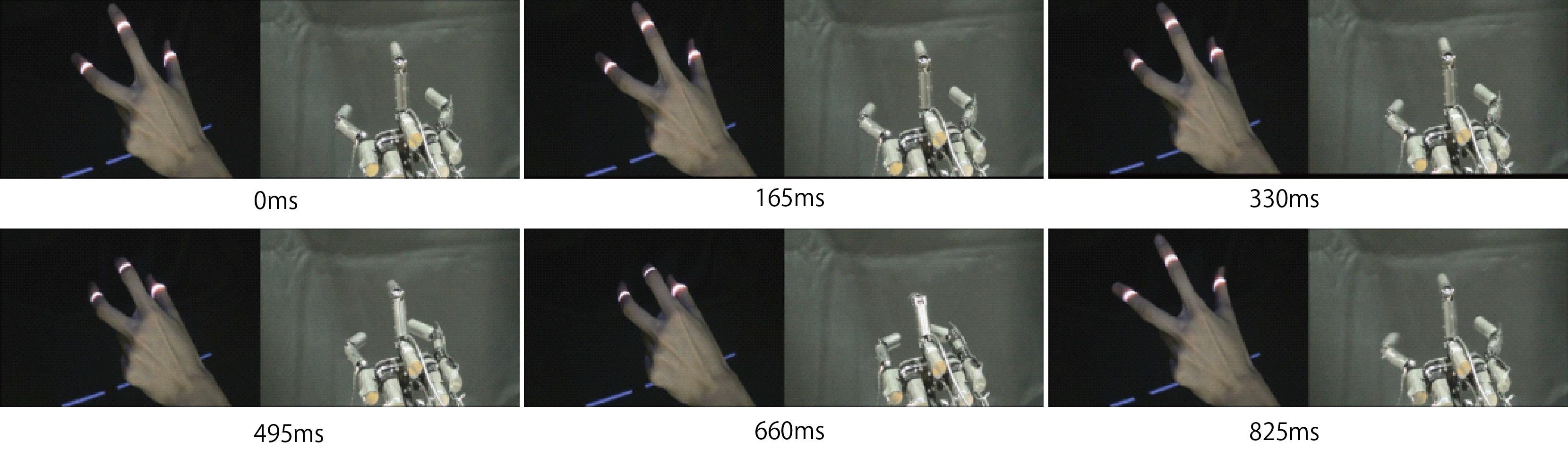
| 図1. テレマニピュレーションの実験結果(連続写真) |
|---|
動画
参考文献
- Yugo Katsuki, Yuji Yamakawa, Yoshihiro Watanabe, Masatoshi Ishikawa and Makoto Shimojo: Super-Low-Latency Telemanipulation Using High-Speed Vision and High-Speed Multifingered Robot Hand, 2015 ACM/IEEE International Conference on Human-Robot Interaction (HRI), (Portland, USA, 2015.3.3) /Proceedings, pp.45-46 (2015)
- Yugo Katsuki, Yuji Yamakawa, Yoshihiro Watanabe and Masatoshi Ishikawa: Development of Fast-Response Master-Slave System Using High-speed Non-contact 3D Sensing and High-speed Robot Hand, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), (Hamburg, 2015.9.29) /Proceedings, pp.1236-1241 (2015)