


Telemanipulation System Using High-Speed Vision and High-Speed Multifingered Robot Hand
Summary
Recently, there has been significant progress in the development of master-slave robot hand system. Especially we focus on master-slave robot hand systems that can realize non-contact sensing and intuitive mapping between human hand motion and robot hand motion. Such a master-slave robot hand system can be effective from a viewpoint of usability. However, conventional systems are not able to adapt to dynamically changing environments because of their high latency from input to output.
Therefore, we developed a master-slave manipulation system using a high-speed robot hand system. This system can reproduce the high-speed motion of human hand at the slave side, and the latency of the proposed system is so small that humans cannot recognize it. Furthermore, the hardness of target object can be measured at high-speed. We confirmed the effectiveness of our proposed system through experiments.
|
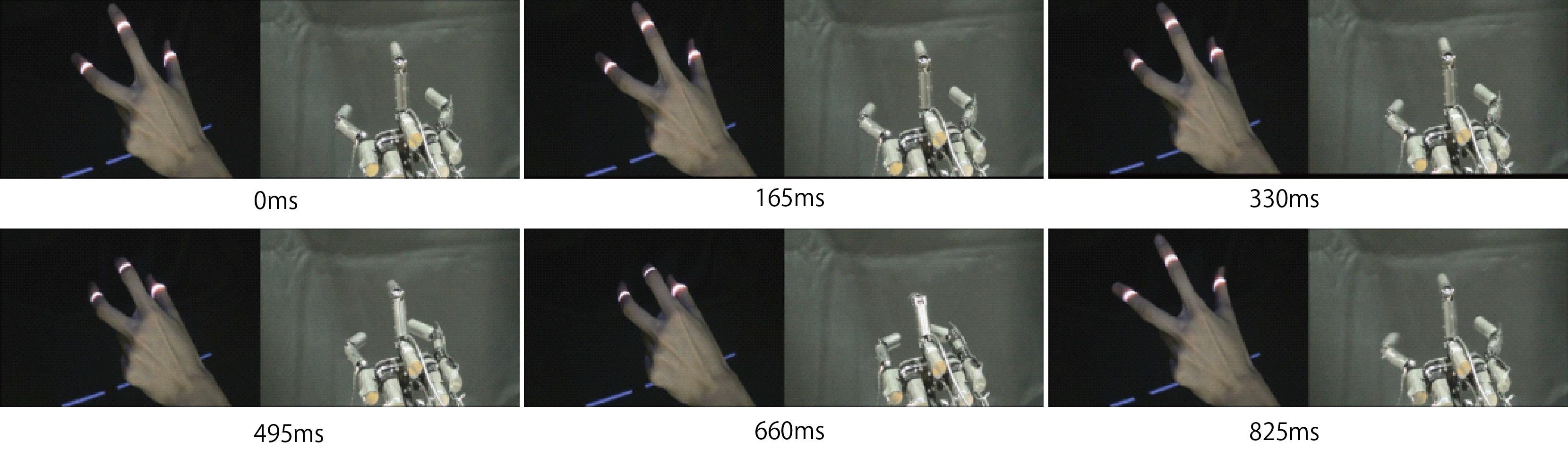
| Figure 1. Experimental result of telemanipulation (continuous photos) |
|---|
Movie
Reference
- Yugo Katsuki, Yuji Yamakawa, Yoshihiro Watanabe, Masatoshi Ishikawa and Makoto Shimojo: Super-Low-Latency Telemanipulation Using High-Speed Vision and High-Speed Multifingered Robot Hand, 2015 ACM/IEEE International Conference on Human-Robot Interaction (HRI), (Portland, USA, 2015.3.3) /Proceedings, pp.45-46 (2015)
- Yugo Katsuki, Yuji Yamakawa, Yoshihiro Watanabe and Masatoshi Ishikawa: Development of Fast-Response Master-Slave System Using High-speed Non-contact 3D Sensing and High-speed Robot Hand, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2015), (Hamburg, 2015.9.29) /Proceedings, pp.1236-1241 (2015)