


ホーム >
センサ フュージョン >
動的補償に基づく高速、高精度ピッキング作業
動的補償に基づく高速、高精度ピッキング作業
概要
従来のロボットはランダムな軌道で動かす小さなターゲットを予測なしで捕ることは非常に困難です。本研究は、先行研究で提案された動的補償の手法を利用し、この問題に取り組む手法を提案しています。動的補償の手法によって、メインロボットは高速かつ大まかな接近の役割を務め、精確な位置決めは相対座標に基づく高速視覚フィードバックを利用した高速かつ軽量の補正アクチュエータで実現しています。提案手法を用いて、90%以上の成功率までに達成しました。
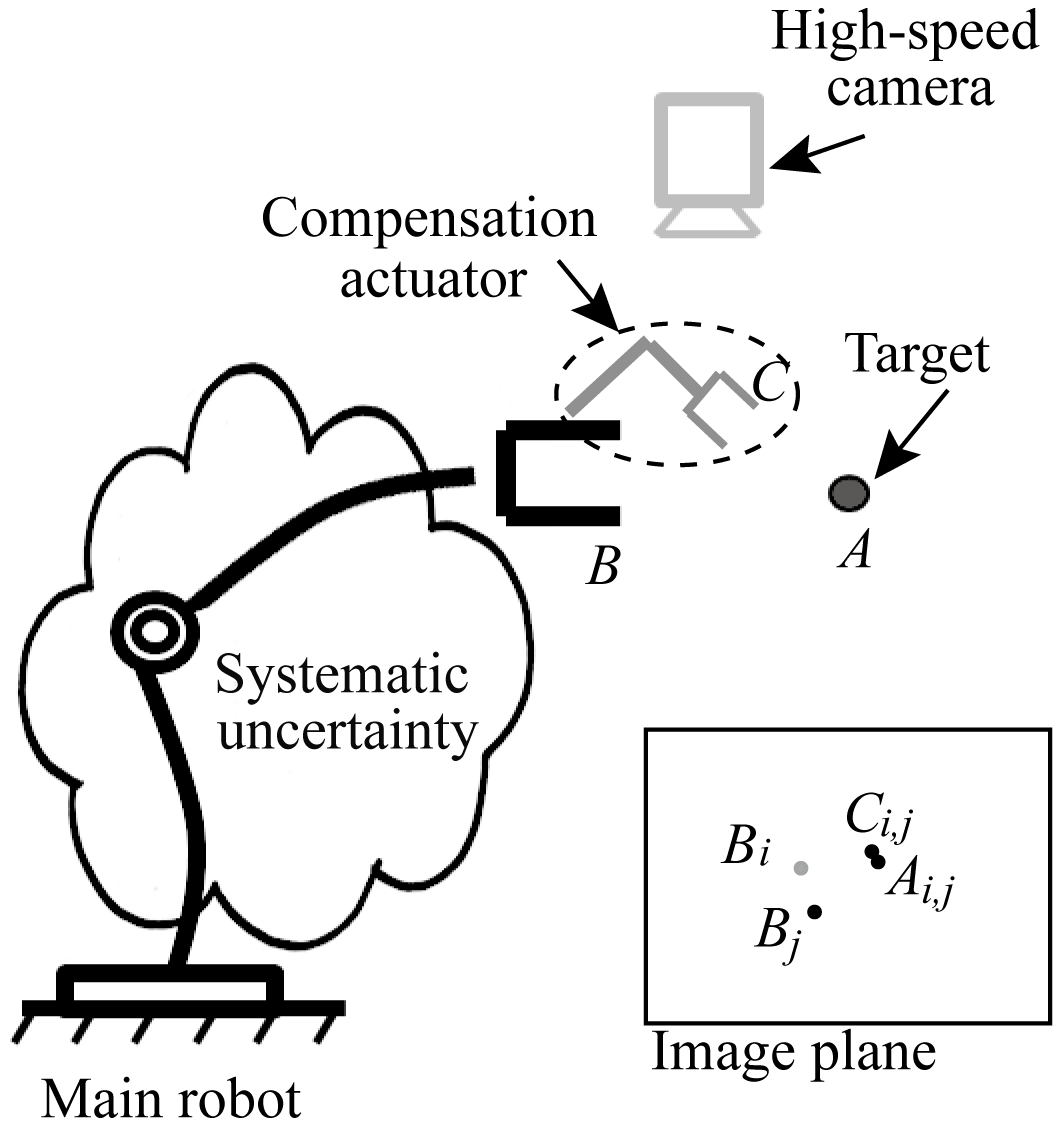
Figure 1. The proposed dynamic compensation concept
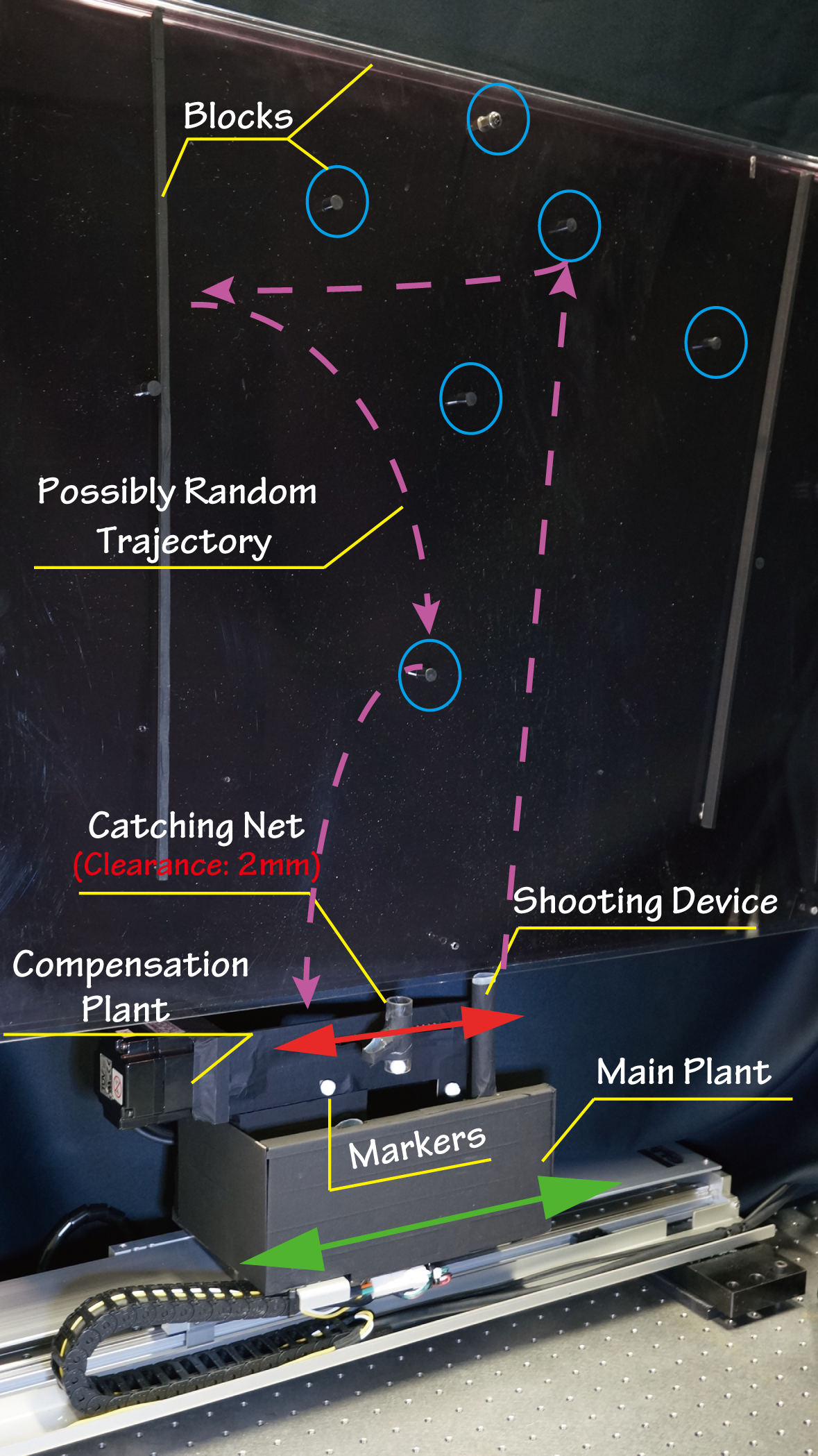
Figure 2. High-speed and accurate picking task
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Shouren Huang, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: Realizing 1D Robotic Catching Without Prediction Based on Dynamic Compensation Concept, 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) (Busan, Korea, 2015.7.10)/Proceedings, pp.1629-1634 (2015)