


High-speed and accurate picking task based on dynamic compensation concept
Summary
It is very challenging to realize high-speed and accurate robotic picking (catching) of small targets with random trajectories in a large workspace without prediction. It requires both high-speed approaching and accurate positioning, whereas these two aspects usually conflict with each other due to nonlinear dynamics and systematic uncertainty like backlash. We proposed the dynamic compensation concept to tackle this problem. It is realized by fusing high-speed visual feedback based on relative coordinate and a high-speed lightweight compensation actuator (for fine positioning) to cooperate with a main traditional robot (for fast yet coarse approaching). Experiments show that for randomly flying object in a work range around 500mm, the success rate reached over 90% (clearance: 2mm) with the proposed approach.
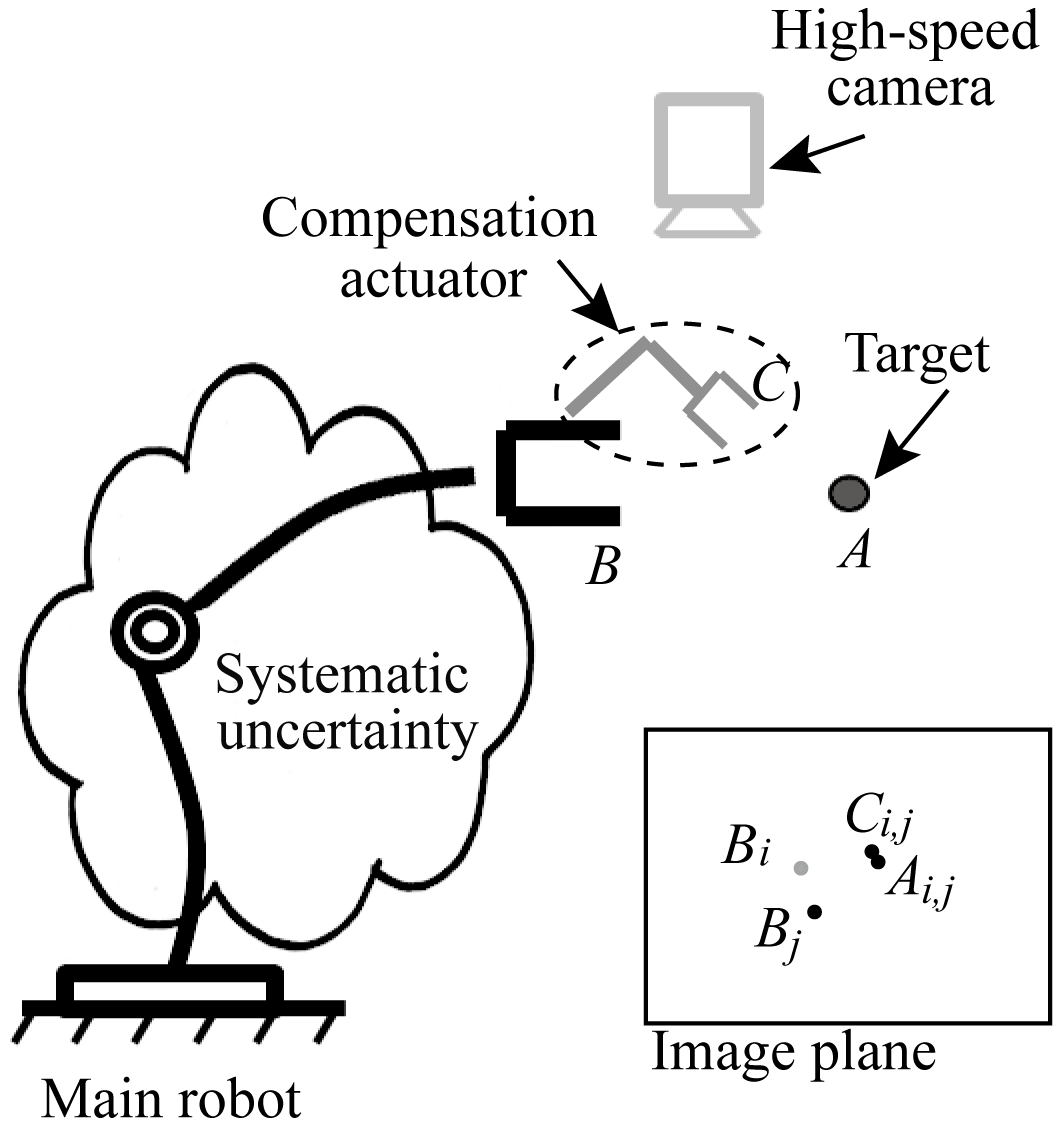
Figure 1. The proposed dynamic compensation concept
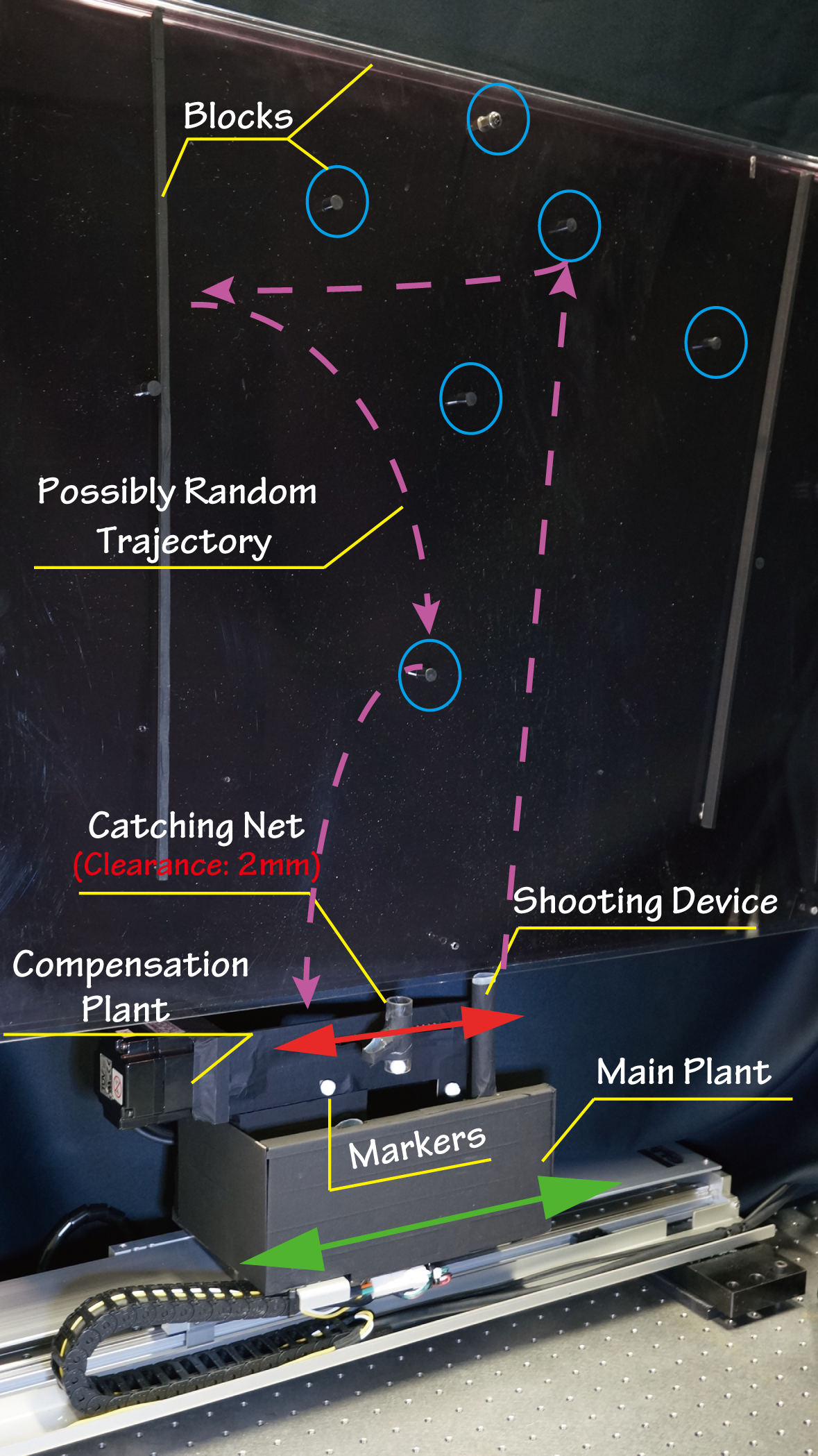
Figure 2. High-speed and accurate picking task
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Shouren Huang, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa: Realizing 1D Robotic Catching Without Prediction Based on Dynamic Compensation Concept, 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) (Busan, Korea, 2015.7.10)/Proceedings, pp.1629-1634 (2015)