


ロボットハンドによる加振を用いたアクティブセンシング
概要
近年,多品種少量生産を達成するため汎用ロボットを用いた生産の需要が増加しており,これに伴って,製品検査の自動化の需要も増している.
一方,カメラを用いた外観検査を除いて,製品の自動検査には専用機械が用いられることが多い.
そこで,本研究では汎用なロボットハンドを用いた製品検査に取り組む.
具体的には,外観検査では検知出来ない対象内部の異常を検知する加振検査を取り扱う.
検査に汎用なロボットハンドを用いることで,生産作業中に製品の異常検知が可能になり,生産性の向上に繋がると考えられる.
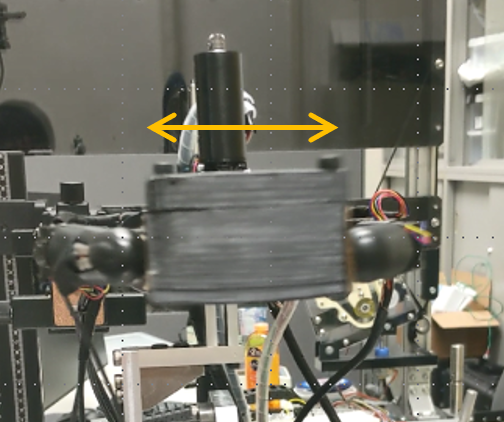
提案する検査手法は,指先に6軸の力覚センサを取り付けられたロボットハンドを用いて,対象を把持して振動を加える.
そして,その際の力の時系列データを解析することで,異常を検知するものである.
今回は,時系列データから3つの特徴量(ピークピーク値,80~1000Hzのバンドパスフィルタを通したセンサ出力のピークピーク値,パワースペクトル密度比推定の500~1000Hzの占める割合)を
ROC-AUC(Area Under the Receiver Operating Characteristic Curve)
により評価した.
また,加える振動は,ベイズ最適化の手法を用いて,判別を行いやすいパラメータを求めている.
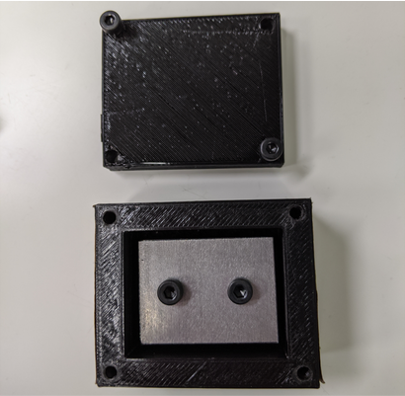
実験を行い,(外部から見れない場所で)ボルトで締結された物体のボルトの緩み検査,外部から見ることが出来ない容器に入った粘性の異なる液体の分別に成功している.
参考文献
- 島田史也, 村上健一, 妹尾拓, 石川正俊: 6軸力センサを搭載したロボットハンドを用いた加振によるボトル内の液体判別, ロボティクス・メカトロニクス講演会 (ROBOMECH2020) (金沢, 2020.5.29 [オンライン])/講演論文集, 2A2-N16.
- Fumiya Shimada, Kenichi Murakami, Taku Senoo, and Masatoshi Ishikawa, Bolt loosening detection using multi-purpose robot hand, The 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2020) (Boston, 2020.7.9 [online])/Proceedings, pp.1860-1866, (2020).