


Active sensing using vibration with robot hand
Summary
In recent years, the demand for production using general-purpose
robots has increased in order to achieve high-mix low-volume
production. Because of this, the demand for automation of product
inspection has also increased. On the other hand, except for visual
inspection using cameras, dedicated machines are often used for
automatic product inspection.
Therefore, in this research, we deal with the product inspection
using a general-purpose robot hand. Specifically, it deals with
vibration inspection that detects abnormalities inside the object
that cannot be detected by visual inspection. By using a
general-purpose robot hand for inspection, it is possible to detect
abnormalities in products during production work, which is thought
to lead to improved productivity.
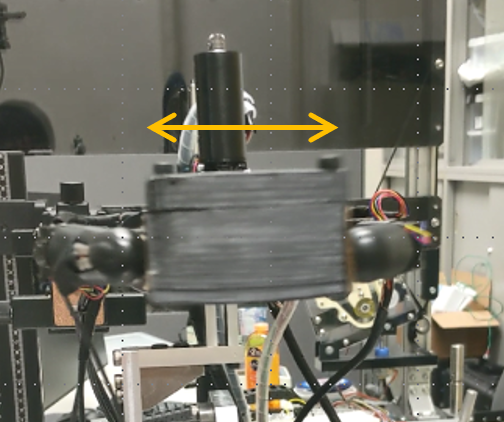
We propose the inspection method that a robot hand attached a 6-axis
force sensor to the fingertip grasps the object and applies
vibration. Then, by analyzing the time-series data of the force at
that time, the abnormality is detected. This time, evaluations are
done by ROC-AUC (Area Under the Receiver Operating Characteristic
Curve) for three features (the peak-to-peak value of the signal, the
peak-to-peak value of the filtered signal(80-1000 Hz bandpass
filter), and the power of high-frequecy vibration) of each axis. In
addition, the parameters of vibration are determined using the
Bayesian optimization method to improve detection accuracy.
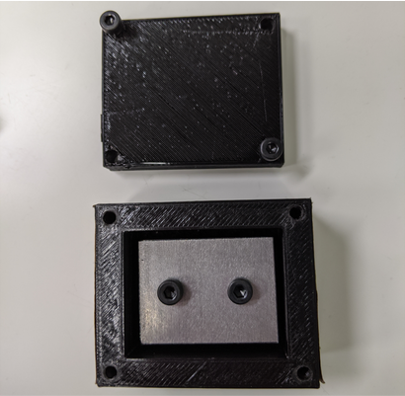
We have conducted experiments and succeeded in inspecting the
looseness of bolts of objects fastened with bolts (in a place that
cannot be seen from the outside) and discriminating liquids with
different viscosities in containers that cannot be seen from the
outside.
Reference
- Fumiya Shimada, Kenichi Murakami, Taku Senoo, and Masatoshi Ishikawa, Bolt loosening detection using multi-purpose robot hand, The 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2020) (Boston, 2020.7.9 [online])/Proceedings, pp.1860-1866, (2020).