


画像モーメント特徴量を用いた実時間3次元形状認識
概要
人間の目には物体を3次元に形状認識する優れた能力があり、 どのような複雑な形をしている物体に対しても画像から空間的に物体を理解・認識することができる。 接触・非接触にかかわらず物体に対応する行動をとる場合にこの能力は必須と言える。 この能力をロボットに応用するのが本研究の目的である。
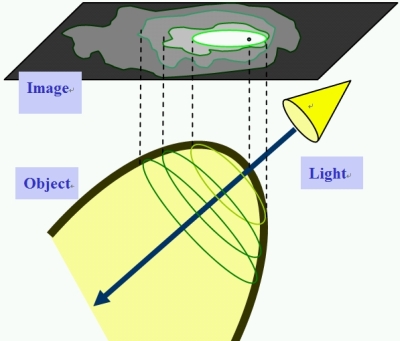
形状計測には、物体に照明を当てて得た画像の輝度が等しい点を結び、 得られる特徴的な形状(等輝線)に注目、 高速ビジョンシステムからリアルタイムに得られるモーメント特徴量を用いて等輝線の形状や広がりを計算し、 元物体のパラメータを求めて認識した。
 ⇒
⇒
 ⇒
⇒
参考文献
- 鵜飼賀生, 並木明夫, 石川正俊:高速ビジョンと能動的照明装置を用いた3次元形状認識, 第4回計測自動制御学会システムインテグレーション部門講演会 (東京, 2003.12.19)/講演論文集, pp.113-114