


Home >
Sensor Fusion >
Plastic Behavior Generation of a Manipulator by Impedance Control
Plastic Behavior Generation of a Manipulator by Impedance Control
Summary
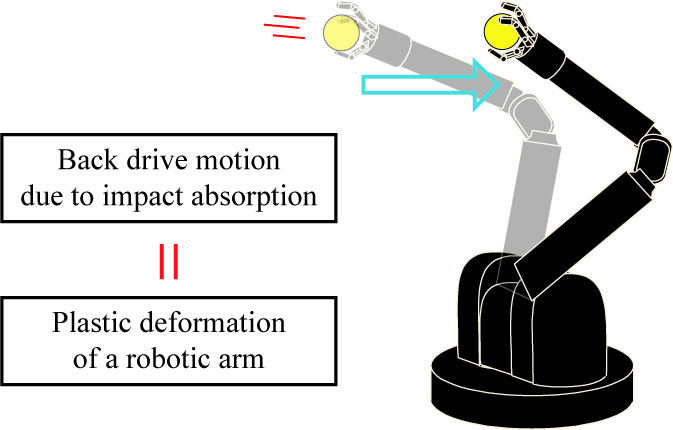
Impedance control for smoothly receiving the impact of an incoming object is designed and realized. The control strategy is based on the idea that the back drive motion of an end-effector attributable to the collision impact is regarded as plastic deformation of the robot. The impedance dynamics is constructed from the Maxwell model, which describes plastic deformation. Next, two types of control methods are proposed in terms of the connection configuration of the spring and the damper. Physical simulation of catching a rolling object with a robotic arm is executed to validate and analyze the proposed methods. Experimetal results based on the concept can also be seen as the Visual Shock Absorber.
Movie
Reference
- Taku Senoo, Masanori Koike, Kenichi Murakami and Masatoshi Ishikawa: Impedance Control Design Based on Plastic Deformation for a Robotic Arm, CASE 2016 (Fort Worth, Texas, 2016.8.23) / IEEE Robotics and Automation Letters, Vol. 2, No. 1, pp. 209-216, 2017. [link]