


ホーム >
センサ フュージョン > 高速ビジュアルフィードバックを用いた高速ロボットハンドによるねじ回し操作
高速ビジュアルフィードバックを用いた高速ロボットハンドによるねじ回し操作
概要
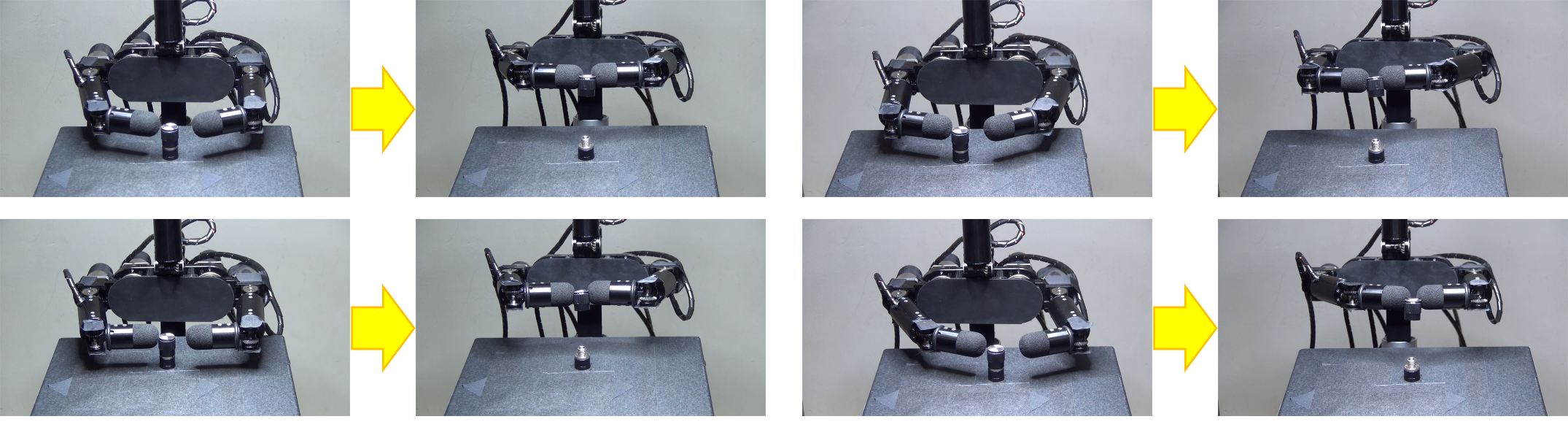
本研究では汎用ロボットハンドによる工業製品の操作に着目する. 具体的なタスクとして,ロボットハンドによるねじの操りを目標とした. 操作対象となるねじ頭部にマーカーを取り付け,ビジョンでその状態を読み取ることによって,ねじの回転情報を抽出し操作に利用した. ビジョン情報にもとづくねじの位置検出に加え,指先の能動的な探索に基づく補正をすることで,位置ずれへの対応を可能とした. 回転数からねじが外れる瞬間を検出して,はずれたねじ頭部のキャッチを行った.
動画
参考文献
- 塚本勇介, 山川雄司, 妹尾拓, 石川正俊: 高速ビジュアルフィードバックを用いた高速ロボットハンドによるねじ回し戦略, ロボティクス・メカトロニクス講演会2016 (横浜, 2016.6.10) / 講演会論文集 2P1-04a3.